Welcome to Matrix Education
To ensure we are showing you the most relevant content, please select your location below.
Select a year to see courses
Select a year to see available courses
In this post, we give you the solutions to the 2020 Maths Extension 2 paper.
Join 75,893 students who already have a head start.
"*" indicates required fields

Join 8000+ students each term who already have a head start on their school academic journey.
The Matrix 2020 HSC Maths Ext 2 Exam Paper Solutions are here!
Have you seen the 2020 HSC Mathematics Extension 2 exam Paper yet?
In this post, we will work our way through the 2020 HSC Maths Extension 2 exam paper and give you the solutions, written by our Head of Mathematics Oak Ukrit and his team.
Read on to see how to answer all of the 2020 questions.
| Question Number | Answer | Solution |
| 1. | B | \begin{equation*} |-\boldsymbol{i} + 18\boldsymbol{j} -6 \boldsymbol{k}| = \sqrt{(-1)^2 + 18^2 + (-6)^2} = \sqrt{361} = 19 \\ \end{equation*} |
| 2. | B | Since the quadratic \(P(z) = z^2 + pz + q\) has real coefficients and \(z = 3+i\) is a non-real root, the conjugate root theorem implies that \(\overline{3+i} = 3-i\) is also a root of \(P(z)\). Hence \begin{align*} Hence \(p = -6, q = 10\). |
| 3. | C | We have \(x = 1 – 2 \lambda\) and \(y = 3 + 4\lambda\). Hence \begin{align*} |
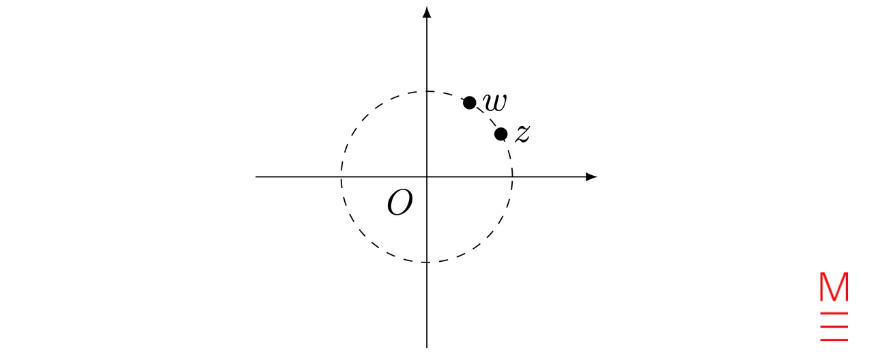
| 4. | A | Let \(w = \displaystyle\frac{z^2}{|z|}\). Then \begin{equation*} so \(w\) has the same modulus as \(z\). Moreover, \begin{equation*} where we have used the fact that \(1/|z| > 0\) (which implies \(\arg(1/|z|) = 0\)). Thus \(w\) has twice the argument of \(z\).
|
| 5. | D | We use the formulas \(a_{\text{max}} = n^2 A\) and \(v_{\text{max}} = nA\). Then \(6 = n^2 A\) and \(4 = nA\), from which we deduce \begin{equation*} Therefore \(T = \frac{2\pi}{n} = \frac{4\pi}{3}\) seconds. |
| 6. | A | A routine integral. \begin{equation*} |
| 7. | D | To disprove the statement, we need to find a prime number \(n\) such that \(2^n – 1\) is not prime. Thus the statement “\(2^{11} – 1\) is divisible by \(23\)” is a counterexample. |
| 8. | B | The statement can be rewritten as: “If \(n\) is even and a multiple of \(3\), then \(n\) is a multiple of \(6\)”. This has the structure \(P \Rightarrow Q\). Therefore, to negate the statement, we would need to say that there exists an example where \(P\) holds but \(Q\) does not hold. Hence the statement “\(n\) is even and \(n\) is a multiple of \(3\), but \(n\) is not a multiple of \(6\)” is the correct negation. |
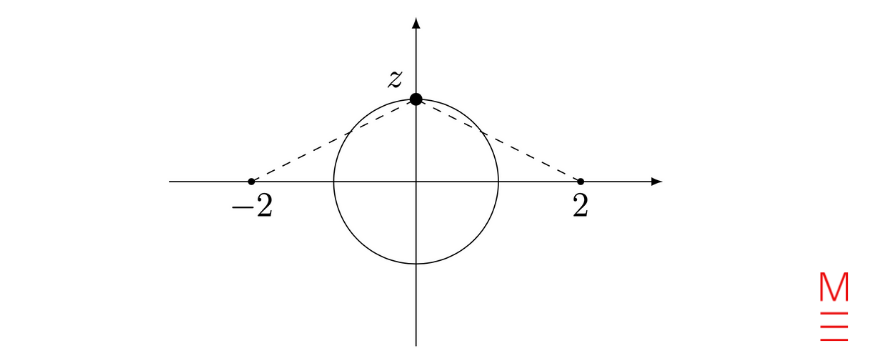
| 9. | C | We solve this geometrically. If \(z = e^{i\theta}\), then \(z\) lies on the unit circle on the complex plane, and the expression \(|z+2| + |z-2|\) is the sum of the distances from \(z\) to \(-2\) and to \(2\) respectively.
“By inspection”‘, the sum of these distances are maximised when \(z\) lies directly on the imaginary axis (as shown in the diagram above). Thus the maximum value is \(\sqrt{5} + \sqrt{5} = 2\sqrt{5}\). Remarks
\begin{equation*} the upper bound \(6\) is not attained. The reason is that the terms \(|e^{i\theta} – 2|\) and \(|e^{i\theta} + 2|\) cannot be maximised simultaneously. |
| 10. | B | Observe that with the substitution \(u = 2a – x\), we obtain \begin{equation*} Thus \begin{equation*} |
(i)
\(|w| = \sqrt{(-1)^2 + 4^2} = \sqrt{17}\)
(ii)
| \(w \overline{z} = (-1+4i)(2+i) = (-2-4) + i(-1+8) = -6 + 7i\) |
| \begin{align*} \int_1^e x \ln x \,dx &= \int_1^e \frac{1}{2} \left( \frac{d}{dx}x^2 \right) \ln x \,dx \\ &= [ \frac{1}{2} x^2 \ln x ]^e_1 – \frac{1}{2} \int_1^e x \,dx \\ &= \frac{1}{2}e^2 – \frac{1}{4}[x^2]^e_1 \\ &= \frac{1}{2}e^2 – \frac{1}{4}(e^2 – 1) = \frac{1}{4}(e^2 + 1) \\ \end{align*} |
The initial conditions are \(x(0) = 0\) and \(v(0) = 1\). Then
| \begin{equation*} a = v \frac{dv}{dx} = v(v+1) \end{equation*} |
We separate variables and then integrate:
| \begin{align*} \frac{v}{v(v+1)} \,dv = dx \Rightarrow \int_0^v \frac{dv’}{v’+1} = \int_0^x dx’ &\Rightarrow \bigg[ \ln|v’+1| \bigg]^v_1 = x \\ &\Rightarrow \ln \ \left| \frac{v+1}{2} \right| = x \end{align*} |
The vectors \(\boldsymbol{u} – \boldsymbol{v}\) and \(\boldsymbol{u} + \boldsymbol{v}\) are perpendicular if and only if
| \begin{equation*} (\boldsymbol{u} – \boldsymbol{v}) \cdot (\boldsymbol{u} + \boldsymbol{v}) = 0 \iff |\boldsymbol{u}|^2 – |\boldsymbol{v}|^2 = 0 \\ \end{equation*} |
Now \(|\boldsymbol{u}|^2 = 2^2 + 1^2 + 3^2 = 14\) and \(|\boldsymbol{v}|^2 = 5 + p^2\). We equate these expressions to obtain
| \begin{equation*} p^2 – 9 = 0 \Rightarrow p = \pm 3 \\ \end{equation*} |
The discriminant is
| \begin{equation*} \Delta = 3^2 – 4(3-i) = -3 + 4i \\ \end{equation*} |
Now let \((x+iy)^2 = -3 + 4i\). Matching real and imaginary parts, we obtain the equations
| \begin{equation*} \begin{cases} x^2 – y^2 = -3 \qquad (1) \\ 2xy = 4 \qquad (2) \\ \end{cases} \end{equation*} |
Moreover, \(|(x+iy)^2| = |x+iy|^2 = |-3 + 4i| = 5\), hence
| \begin{equation*} x^2 + y^2 = 5 \qquad (3) \\ \end{equation*} |
Adding equation (1) to (3) gives \(2x^2 = 2\), whence \(x = \pm 1\). Substituting these values into (2) gives
| \begin{equation*} (x, y) = (1, 2) \text{ or } (-1, -2) \Rightarrow x + iy = \pm(1+2i) \\ \end{equation*} |
Now we apply the quadratic formula:
| \begin{align*} z = \frac{-3 \pm \sqrt{-3 + 4i}}{2} = \frac{-3 \pm (1+2i)}{2} &= \frac{-3-1-2i}{2} \text{ or } \frac{-3+1 +2i}{2} \\ &= -2 – i \text{ or } -1 + i \\ \end{align*} |
(i)
The vertical component of tension together with the normal force balances out the weight force. Hence
| \begin{equation*} R + 200 \sin(30^\circ) = 50g \Rightarrow R = (500 \times 10) – (200 \times \tfrac{1}{2}) = 400 {N} \\ \end{equation*} |
(ii)
| \(200 \cos(30^\circ) – 0.3R = 100\sqrt{3} – (0.3 \times 400) \approx 53.2 {N}\) (note the minus sign for the resistive term). |
(iii)
By Newton’s second law \(F = ma\), we have
| \begin{equation*} 50a = 53.2 \Rightarrow a = 1.064 \\ \end{equation*} |
(to 3 decimal places). Since the acceleration is constant, we have
| \begin{equation*} v = 3 \times 1.064 = 3.192 \ {m/s} \\ \end{equation*} |
Question 12b
(i)
A standard exercise, we omit the details 🙂
| \begin{equation*} \begin{pmatrix} \ddot{x} \\ \ddot{y} \end{pmatrix} = \begin{pmatrix} 0 \\ -g \end{pmatrix}, \quad \begin{pmatrix} \dot{x} \\ \dot{y} \end{pmatrix} = \begin{pmatrix} u \cos \theta \\ -gt + u \sin \theta \end{pmatrix}, \quad \begin{pmatrix} x \\ y \end{pmatrix} = \begin{pmatrix} ut \cos \theta \\ -\frac{1}{2}gt^2 + ut \sin \theta \end{pmatrix} \end{equation*} |
(ii)
From the equations for \(x\) and \(y\) derived in (i), we have
| \begin{equation*} x = ut \cos \theta \qquad y = -\frac{1}{2}gt^2 + ut \sin \theta \\ \end{equation*} |
Eliminate the parameter \(t\), and substitute it into the equation for \(y\):
| \begin{align*} t = \frac{x}{u \cos\theta} &\Rightarrow y = -\frac{1}{2}g ( \frac{x}{u \cos\theta} )^2 + u \left( \frac{x}{u\cos\theta} \right) \sin\theta \\ &\Rightarrow y = -\frac{gx^2}{2u^2} \sec^2\theta + x \tan\theta = -\frac{gx^2}{2u^2}\left( \tan^2 \theta – \frac{2u^2}{gx} \tan \theta + 1\right) \\ \end{align*} |
where we have used \(\sec^2\theta = \tan^2\theta + 1\).
(iii)
At \(x=R\), we have \(y=0\). Substituting these values into the equation from part (ii) gives
| \begin{equation*} 0 = -\frac{gR^2}{2u^2} \left( \tan^2\theta \ – \frac{2u^2}{gR} \tan \theta + 1\right)\\ \end{equation*} |
We can cancel the factor of \(-gR^2/2u^2\) to obtain
| \begin{equation*} \tan^2 \theta \ – \frac{2u^2}{gR} \tan \theta + 1 = 0 \\ \end{equation*} |
This is a quadratic equation in \(\tan \theta\). We would like to have 2 real solutions, and this is possible if and only if the discriminant is strictly positive, that is
| \begin{equation*} \left( \frac{2u^2}{gR} \right)^2 – 4 > 0 \Rightarrow \left( \frac{u^2}{gR}\right)^2 – 1 > 0 \\ \end{equation*} |
However, if \(u^2 > gR\), then \(\frac{u^2}{gR} > 1\), and therefore the above inequality is satisfied.
Since we are given \(T=\frac{\pi}{3}\), we obtain that \(n=\frac{2\pi}{T}=6\).
The central point of motion is \(x_0=\sqrt{3}\) and the amplitude of the motion is \(A=2\sqrt{3}\).
At \(t=0\), the particle is at its maximum displacement and therefore the equation of motion is
| \begin{equation*} x(t)=\sqrt{3}+2\sqrt{3} \cos (6t) \\ \end{equation*} |
By equating components we obtain the simultaneous equations
| \begin{cases} 3+\lambda_1&=3-2\lambda_2 & (1)\\ -1+2\lambda_1&=-6+\lambda_2 & (2)\\ 7+\lambda_1&=2+3\lambda_2 & (3)\\ \end{cases} |
Subtracting the first equation from the third, we find that the point of intersection occurs at \(\lambda_2=1\).
By substituting \(\lambda_2=1\) back into equations (1) or (2) we obtain that \(\lambda_1=-2\).
It is easy to check that \(\lambda_1=-2\) and \(\lambda_2=1\) also satisfy equation (2).
Therefore the lines intersect, and the point of intersection is
| \begin{equation*} \begin{pmatrix} 3 \\ -6 \\ 2 \end{pmatrix} + \begin{pmatrix} -2 \\ 1 \\ 3 \end{pmatrix} = \begin{pmatrix} 1 \\ -5 \\ 5 \end{pmatrix} \\ \end{equation*} |
(i)
By Pythagoras’ theorem we obtain that \(x=2\sqrt{ab}\).
Since the hypotenuse is always the longest side of the triangle we get that
| \begin{equation*} a+b \geq 2\sqrt{ab}\\ \end{equation*} |
from which the desired inequality follows.
Remark: Of course, we could have deduced this inequality from the simple observation that
| \begin{equation*} 0 \le (\sqrt{a} – \sqrt{b})^2 = a + b – 2\sqrt{ab} \\ \end{equation*} |
(ii)
Since \(a>b\geq0\) we may substitute \(a=p^2\) and \(b=4q^2\), yielding the desired inequality
| \begin{equation*} p^2 +4q^2 \geq 2 \sqrt{p^2 \cdot 4q^2} = 4 \left| pq \right| \geq 4pq \\ \end{equation*} |
Remark: The inequality can also be proved via the following simple observation:
| \begin{equation*} 0 \le (p – 2q)^2 = p^2 + 4q^2 – 4pq \\ \end{equation*} |
(i)
By DeMoivre’s theorem we have that \(e^{i n\theta} = \cos (n\theta)+i \sin (n\theta)\) and
| \begin{align*} e^{-i n\theta} &= \cos (-n\theta)+i \sin (-n\theta) \\ &= \cos (n\theta)-i \sin (n\theta) \\ \end{align*} |
Adding the two equations we obtain the required result
| \begin{equation*} e^{i n\theta} + e^{-i n\theta} = 2\cos (n\theta) \\ \end{equation*} |
(ii)
Using the Binomial theorem we have that
| \begin{align*} (e^{i\theta}+e^{-i\theta})^4 &= e^{4i\theta} + 4e^{3i\theta} e^{-i\theta} + 6 e^{2i\theta} e^{-2i\theta} + 4 e^{i\theta} e^{-3i\theta} + e^{-4i\theta} \\ &= (e^{4i\theta} + e^{-4i\theta} ) + 4(e^{2i\theta}+ e^{-2i\theta}) + 6 \\ &= 2 \cos(4\theta)+8\cos (2\theta) + 6 \, . \end{align*} |
We also have that
| \begin{equation*} (e^{i\theta}+e^{-i\theta})^4 = (2\cos\theta)^4 = 16 \cos^4 \theta \\. \end{equation*} |
Equating these two expressions and dividing through by \(16\), we obtain the required result
| \begin{equation*} \cos^4 \theta = \frac{1}{8} ( \cos (4\theta) + 4 \cos (2\theta) + 3) \\ \end{equation*} |
(iii)
Using part (ii) we calculate that
| \begin{align*} \int_0^{\pi/2} \cos^4 \theta \, d\theta &= \int_0^{\pi/2} \frac{1}{8} \left( \cos (4\theta) + 4 \cos (2\theta) + 3 \right) \, d\theta \\ &= \left[ \frac{1}{8} \left( \frac{\sin(4\theta)}{4} + \frac{\sin 2\theta }{2}+3\theta \right) \right]_0^{\pi/2} \\ &= \frac{3\pi}{16} \\ \end{align*} |
(i)
We have that \(|z_2| = |e^{i\pi/3}z_1| = |z_1|\), since \(|e^{i\theta}| = 1\) for all \(\theta \in \boldsymbol{R}\). Moreover,
| \begin{equation*} \angle AOB = \arg(z_2) – \arg(z_1) = \arg \left( \frac{z_2}{z_1} \right) = \arg(e^{i\pi/3}) = \frac{\pi}{3} \\ \end{equation*} |
Hence \(\Delta AOB\) is isosceles with \(\angle AOB = \tfrac{\pi}{3}\).
But then \(\angle OBA = \angle BAO = \tfrac{1}{2}(\pi – \tfrac{\pi}{3}) = \tfrac{\pi}{3}\).
This shows that \(\Delta OAB\) is equilateral.
(ii)
Consider the sum of cubes
| \begin{align*} z_1^3 + z_2^3 &= z_1^3 + (e^{i \frac{\pi}{3}} z_1)^3 \\ &= z_1^3 + e^{i\pi} z_1^3 \\ &= z_1^3 – z_1^3 \\ &= 0 \, . \end{align*} |
Using the sum of cubes formula we obtain that
| \begin{align*} (z_1+z_2)(z_1^2 -z_1 z_2 + z_2^2) =z_1^3 + z_2^3 = 0 \, , \end{align*} |
and since \(z_1+z_2 \not = 0\), we conclude that \(z_1^2 -z_1 z_2 + z_2^2=0\). Rearranging this leads to the required result.
| \begin{align*} a &= 10 \left( 1- (kv)^2 \right) \\ \frac{dv}{dt} &= 10(1-k^2v^2) \\ \frac{dv}{(1-kv)(1+kv)} &= 10 dt \\ \frac{1}{2} \int_0^v \frac{1}{1-kv} + \frac{1}{1+kv} \ dv &= \int_0^5 10 \ dt \\ \frac{1}{2k} \left[ \ln|1+kv| – \ln|1-kv|\right]_0^v &=50 \\ \left[ \ln \left| \frac{1+kv}{1-kv} \right|\right]_0^v &= 100k \\ \frac{1+kv}{1-kv} &= e^{100k} \\ \end{align*} |
where we take the positive absolute value due to the initial condition \(v=0\).
Solving for \(v\) and plugging in \(k=0.01\), we get
| \begin{equation*} v = \frac{1}{k} \left( \frac{e^{100k}-1}{e^{100k}+1}\right) \approx 46.213 {ms^{-1}} \ (3\text{ d.p.}) \\ \end{equation*} |
The base case \(n=2\) is immediate, since
| \begin{equation*} \frac{1}{2^2} = \frac{1}{4} < \frac{2-1}{2} = \frac{1}{2} \\ \end{equation*} |
Assume that the statement holds for some \(k > 2\), that is,
| \begin{equation*} \frac{1}{2^2} + \frac{1}{3^2} + \ldots + \frac{1}{k^2} < \frac{k-1}{k} \\ \end{equation*} |
We prove that it holds for \(k+1\). Observe that
| \begin{equation*} \frac{1}{2^2} + \frac{1}{3^2} + \ldots + \frac{1}{k^2} + \frac{1}{(k+1)^2} < \frac{k-1}{k} + \frac{1}{(k+1)^2} \\ \end{equation*} |
by the induction hypothesis. Hence it suffices to show that
| \begin{equation*} \frac{k-1}{k} + \frac{1}{(k+1)^2} \le \frac{k}{k+1} \\ \end{equation*} |
However, this follows from the estimate given below:
| \begin{align*} \frac{k-1}{k} + \frac{1}{(k+1)^2} &< \frac{k-1}{k} + \frac{1}{k(k+1)} \\ &= \frac{1}{k} \left(k-1 + \frac{1}{k+1} \right) \\ &= \frac{1}{k} \frac{(k^2 – 1) + 1}{k+1} \\ &= \frac{1}{k} \frac{k^2}{k+1} \\ &=\frac{k}{k+1} \\ \end{align*} |
We conclude that
| \begin{equation*} \frac{1}{2^2} + \frac{1}{3^2} + \ldots + \frac{1}{k^2} + \frac{1}{(k+1)^2} < \frac{k}{k+1} \end{equation*} |
so the statement is true for \(k+1\). This completes the induction.
Remark: We give a very short, non-inductive proof of the inequality:
| \begin{align*} \frac{1}{2^2} + \frac{1}{3^2} + \ldots \frac{1}{n^2} = \sum_{k=2}^n \frac{1}{k^2} &< \sum_{k=2}^n \frac{1}{k(k-1)} \\ &= \sum_{k=2}^n \left( \frac{1}{k-1} – \frac{1}{k} \right) = 1 – \frac{1}{n} = \frac{n-1}{n} \\ \end{align*} |
Suppose for contradiction that \(\log_n(n+1) = \frac{a}{b}\) with \(a, b \in \boldsymbol{Z}\) (i.e. we assume it is a rational number). Then
| \begin{equation*} n+1 = n^{a/b} \Rightarrow (n+1)^b = n^a \qquad (\star) \\ \end{equation*} |
Now we examine two cases. If \(n\) is odd, then the left-hand side of (\(\star\)) is even while the right-hand side is odd.
However, if \(n\) is even, then the left-hand side of (\(\star\)) is odd while the right-hand side is even. In both cases, we obtain a contradiction.
Hence \(\log_n(n+1)\) is irrational.
(i)
Since \(k+1\) is divisible by \(3\) we may write \(k+1=3m\) for some \(m \in \boldsymbol{Z}\). We calculate that
| \begin{align*} k^3+1 &= (k+1)^3 – 3k^2 -3k \\ &= (3m)^3-3k^2-3k \\ &= 3(9m^2-k^2-k) \\ \end{align*} |
and therefore conclude that \(k^3+1\) is also divisible by \(3\).
(ii)
If \(k^3 + 1\) is not divisible by 3, then \(k+1\) is not divisible by \(3\).
(iii)
The converse of \(P\) is `If \(k^3+1\) is divisible by \(3\), then \(k+1\) is divisible by \(3\)‘.
This proposition is true and we shall prove it using the contrapositive.
To prove the contrapositive we assume that \(k+1\) is not divisible by \(3\) and show that \(k^3+1\) is not divisible by \(3\).
Since by assumption \(k+1\) is not divisible by \(3\), we may write \(k+1=3p+r\) where \(p \in \boldsymbol{Z}\) and \(r=1\) or \(r=2\).
Expanding \((k+1)^3\) using the Binomial theorem we obtain that
| \begin{align*} (k+1)^3 &= (3p+r)^3 \\ &= 27p^3+27p^2r+9pr^2+r^3 \\ &= 3(9p^2+9p^2r+3pr^2) + r^3 \, . \end{align*} |
If \(r=1\) then
| \begin{equation*} (k+1)^3 = 3(9p^2+9p^2r+3pr^2) + 1 \\, \end{equation*} |
and if \(r=2\) then
| \begin{equation*} (k+1)^3 = 3(9p^2+9p^2r+3pr^2+2) + 2 \, . \end{equation*} |
In both cases, it is clear that \((k+1)^3\) is not divisible by \(3\), as required.
(i)
We have that \(\frac{|\overrightarrow{CB}|}{|\overrightarrow{AC}|}=\frac{m}{n}\), which gives \(|\overrightarrow{CB}| = \frac{m}{n} |\overrightarrow{AC}|\).
Consequently \(\overrightarrow{CB} = \frac{m}{n} \overrightarrow{AC}\), since \(\overrightarrow{CB}\) is parallel to \(\overrightarrow{AC}\).
Thus
| \begin{align*} \overrightarrow{AC}+\overrightarrow{CB}&=\overrightarrow{AB} \\ \overrightarrow{AC}+\frac{m}{n}\overrightarrow{AC} &=\overrightarrow{AB} \\ \frac{m+n}{n} \overrightarrow{AC} &= \overrightarrow{AB} \\ \overrightarrow{AC} &= \frac{n}{m+n} \overrightarrow{AB} \\ &= \frac{n}{m+n} ( \underset{\sim}{b} – \underset{\sim}{a} ) \\ \end{align*} |
(ii)
| \begin{align*} \overrightarrow{AC} &= \overrightarrow{OC} – \overrightarrow{OA} \\ \overrightarrow{OC} &= \overrightarrow{AC} + \overrightarrow{OA} \\ &= \frac{n}{m+n} ( \underset{\sim}{b}-\underset{\sim}{a}) + \underset{\sim}{a} \\ &= \frac{1}{m+n} ( n \underset{\sim}{b} – n\underset{\sim}{a} + m \underset{\sim}{a} + n \underset{\sim}{a} ) \\ &= \frac{m}{m+n} \underset{\sim}{a} + \frac{n}{m+n} \underset{\sim}{b} \\ \end{align*} |
(iii)
We observe that \(T\) is the point of intersection of the lines \(OS\) and \(PR\).
These lines can be parametrically defined by \(\lambda_1 ( \underset{\sim}{r} + \frac{1}{2} \underset{\sim}{p} ) \) and \(\underset{\sim}{r} + \lambda_2 (\underset{\sim}{p} – \underset{\sim}{r})\).
Equating the components of \(\underset{\sim}{r}\) and \(\underset{\sim}{p}\) provide
| \begin{align*} \lambda_1 &= 1 – \lambda_2 \\ \frac{1}{2} \lambda_1 &= \lambda_2 \end{align*} |
Adding these equations, we obtain \(\frac{3}{2} \lambda_1 =1\) and so \(\lambda_2 = \frac{1}{3}\). Substituting this back into either parameterisation gives
| \begin{align*} \overrightarrow{OT} &= \frac{2}{3} \left( \underset{\sim}{r} + \frac{1}{2} \underset{\sim}{p} \right) \\ &= \frac{2}{3} \underset{\sim}{r} + \frac{1}{3} \underset{\sim}{p} \\ \end{align*} |
(iv)
By considering \(\Delta OPR\) and comparing with the diagram in (ii), we may observe that, with \(\underset{\sim}{a} \rightarrow \underset{\sim}{p}\) and \(\underset{\sim}{b} \rightarrow \underset{\sim}{r}\), to see that
| \begin{equation*} \overrightarrow{OT} = \frac{m}{m+n} \underset{\sim}{p} + \frac{n}{m+n} \underset{\sim}{r} \\ \end{equation*} |
where \(\frac{TR}{PT} = \frac{m}{n}\). Thus we have that
| \begin{equation*} \frac{m}{m+n} = \frac{2}{3} \ \text{ and } \ \frac{n}{m+n} = \frac{1}{3} \\ \end{equation*} |
Dividing these equations, we get that
| \begin{equation*} \frac{m}{n} = \frac{m/(m+n)}{n/(m+n)} = \frac{2/3}{1/3} = \frac{2}{1} \\ \end{equation*} |
So \(\frac{RT}{PT} = \frac{2}{1}\) and so \(T\) divides \(PR\) in the ratio \(2:1\).
Question 16a
(i)
Since air resistance acts to oppose the motion of each mass, the free body diagrams are
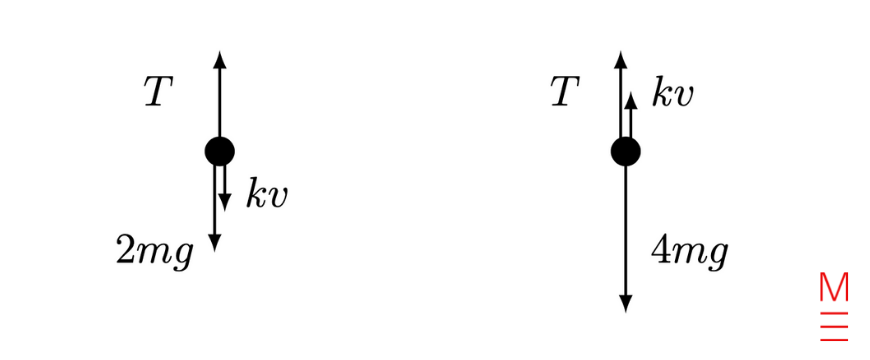
where \(T\) denotes the tension force of the string. Working in a coordinate system where the upward direction is positive, the net forces \(F_1\) and \(F_2\) on the masses are
| \begin{align*} F_1 &= T – kv – 2mg \\ F_2 &= T +kv – 4mg \\ \end{align*} |
By Newton’s second law \(F=ma\), the accelerations of the two masses \(a_1\) and \(a_2\) are
| \begin{align*} a_1 &= \frac{T – kv – 2mg}{2m} \\ a_2 &= \frac{T +kv – 4mg}{4m} \\ \end{align*} |
Since the string is inextensible, the masses will accelerate at the same rate but in opposite directions. Setting \(a_1=-a_2\) we obtain that
| \begin{equation*} \frac{T – kv – 2mg}{2m} = – \frac{T + kv – 4mg}{4m} \\ \end{equation*} |
which upon rearranging for \(T\) yields
| \begin{equation*} T = \frac{8mg+kv}{3} \\ \end{equation*} |
Substituting \(T\) back into the equation for \(a_2\) we obtain that
| \begin{equation*} a_2= \frac{1}{4m} \left( \frac{8mg+kv}{3} + kv -4mg \right) = \frac{kv – mg}{3m} \\ \end{equation*} |
Since an increase in the velocity \(v\) (\(\frac{dv}{dt}>0\)) corresponds to negative acceleration \(a_2\), we set \(\frac{dv}{dt}=-a_2\). The required result then follows
| \begin{equation*} \frac{dv}{dt}= \frac{mg- kv}{3m} \\ \end{equation*} |
Remark: Note that choosing to work in a coordinate system where the downward direction is positive would require setting \(a_2=\frac{dv}{dt}\), since an increase in the velocity \(v\) corresponds to a positive acceleration.
(ii)
We separate variables and integrate:
| \begin{align*} \int_0^v \frac{dv’}{gm-kv’} &= \frac{1}{3m} \int_0^t \,dt’ \\ -\frac{1}{k} \bigg[ \ln|gm-kv’| \bigg]^v_0 &= \frac{t}{3m} \\ -\frac{1}{k} \ln \left| \frac{gm-kv}{gm} \right| &= \frac{t}{3m} \\ \left| \frac{gm-kv}{gm} \right| &= e^{-\tfrac{kt}{3m}} \end{align*} |
We are given that \(v < \frac{gm}{k}\), which implies \(gm – kv > 0\). Hence we can remove the absolute values:
| \begin{align*} \frac{gm-kv}{gm} &= e^{-\tfrac{kt}{3m}} \\ gm – kv &= gm e^{-\tfrac{kt}{3m}} \\ \Rightarrow v &= \frac{gm}{k} \left(1 – e^{-\tfrac{kt}{3m}} \right) \end{align*} |
When \(t = \frac{3m}{k} \ln 2\), we have
| \begin{equation*} v = \frac{gm}{k} \left( 1 – e^{-\ln 2} \right) = \frac{gm}{k} (1 – e^{\ln(1/2)}) = \frac{gm}{k}(1 – \tfrac{1}{2}) = \frac{gm}{2k} \end{equation*} |
as required.
(i)
This is an HSC classic. The method is to split off one copy of \(\sin(2\theta)\) and integrate by parts:
| \begin{align*} I_n &= \int_0^{\pi/2} \sin(2\theta) \sin^{2n}(2\theta)\,d\theta \\ &= \int_0^{\pi/2} \frac{d}{d\theta}\left( -\frac{1}{2} \cos(2\theta) \right) \sin^{2n}(2\theta) \,d\theta \\ &= \left[ -\frac{1}{2} \cos(2\theta) \sin^{2n}(2\theta) \right]^{\pi/2}_0 + \frac{1}{2} \int_0^{\pi/2} 4n \cos^2(2\theta) \sin^{2n-1}(2\theta) \,d\theta \\ &= 2n \int_0^{\pi/2} \sin^{2n-1}(2\theta) [1-\sin^2(2\theta)] \,d\theta \\ &= 2n(I_{n-1} – I_n) \\ \end{align*} |
After rearranging, we obtain \(I_n = \frac{2n}{2n+1} I_{n-1}\) as required.
(ii)
From part (i), we find that
| \begin{align*} I_n = \frac{2n}{2n+1} I_{n-1} &= \frac{2n}{2n+1} \frac{2(n-1)}{2n-1} I_{n-2} \\ &= \ldots \\ &= \frac{2^n n!}{(2n+1)(2n-1)(2n-3)\cdots 5 \cdot 3 \cdot 1} I_0 \end{align*} |
We can easily calculate
| \begin{equation*} I_0 = \int_0^{\pi/2} \sin(2\theta) \,d\theta = \left[ -\frac{1}{2}\cos(2\theta) \right]^{\pi/2}_0 = -\frac{1}{2}(-1-1) = 1 \end{equation*} |
Therefore
| \begin{align*} I_n = \frac{2^n n!}{(2n+1)(2n-1)(2n-3)\cdots 5 \cdot 3 \cdot 1} &= \frac{2^n (2n)(2n-2)\cdots(6 \cdot 4 \cdot 2) n!}{(2n+1)!} \\ &= \frac{(2^n)(2^n) n(n-1)(n-2)\cdots (3\cdot 2 \cdot 1) n!}{(2n+1)!} \\ &= \frac{2^{2n}(n!)^2}{(2n+1)!} \end{align*} |
Observe how we have “filled in” the missing terms in the denominator to get \((2n+1)!\) by multiplying top and bottom by \((2n)(2n-2)\cdots(6 \cdot 4\cdot 2)\).
(iii)
The most straightforward approach is to use the substitution \(? = \sin^2(?)\). Then let \(?? = 2 \sin ? \cos ? \ ??\), we find that
| \begin{align*} J_n &= \int_0^{\pi/2} \sin^{2n}\theta (1 – \sin^2 \theta)^n (2 \sin\theta\cos\theta) \,d\theta \\ &= 2 \int_0^{\pi/2} \sin^{2n}\theta \cos^{2n}\theta \sin\theta\cos\theta \,d\theta \\ &= \frac{1}{2^n} \int_0^{\pi/2} (2 \sin\theta\cos\theta)^{n+1} \,d\theta \\ &= \frac{1}{2^n} \int_0^{\pi/2} \sin^{2n+1}(2\theta) \,d\theta \\ (\text{by part (ii)}) \quad &= \frac{1}{2^n} I_n = \frac{(n!)^2}{(2n+1)!} \\ \end{align*} |
Remark: Alternatively, this question can be done by integrating by parts \(n\) times. We leave this as an exercise 🙂 . \(J_n\) is also recognisable as the beta function \(B(\alpha,\beta)\) evaluated at \(\alpha=\beta=n+1\) (for students who are further interested in these special integrals.)
(iv)
The function \(f(x) = x(1-x)\) attains its maximum at \(x=\tfrac{1}{2}\), where \(f(\tfrac{1}{2}) = \tfrac{1}{4}\). This can be shown using calculus, or by simply observing that
| \begin{equation*} x(1-x) = \frac{1}{4} – \left(x – \frac{1}{2} \right)^2 \le \frac{1}{4} \end{equation*} |
for all \(x \in [0,1]\). It follows that
| \begin{equation*} 0 \le f(x)^n \le \frac{1}{4^n} = \frac{1}{2^{2n}} \end{equation*} |
We deduce
| \begin{equation*} \frac{(n!)^2}{(2n+1)!} = J_n = \int_0^1 x^n (1-x)^n \,dx \le \frac{1}{2^{2n}} \int_0^1 \,dx = \frac{1}{2^{2n}} \end{equation*} |
Rearranging the inequality above yields \((2^n n!)^2 \le (2n+1)!\) as required.
Use the calculator to explore the HSC Marks you need to achieve your ATAR Goal.
Written by Matrix Maths Team
The Matrix Maths Team are tutors and teachers with a passion for Mathematics and a dedication to seeing Matrix Students achieving their academic goals.© Matrix Education and www.matrix.edu.au, 2025. Unauthorised use and/or duplication of this material without express and written permission from this site’s author and/or owner is strictly prohibited. Excerpts and links may be used, provided that full and clear credit is given to Matrix Education and www.matrix.edu.au with appropriate and specific direction to the original content.