Welcome to Matrix Education
To ensure we are showing you the most relevant content, please select your location below.
Select a year to see courses
Select a year to see available courses
In this post, we give you the solutions to the 2019 Maths Extension 2 paper.

Join 75,893 students who already have a head start.
"*" indicates required fields

Join 8000+ students each term who already have a head start on their school academic journey.
The Matrix 2019 HSC Maths Ext 2 Exam Paper Solutions are here!
Have you seen the 2019 HSC Mathematics Extension 2 exam Paper yet?
In this post, we will work our way through the 2019 HSC Maths Extension 2 exam paper and give you the solutions, written by our Head of Mathematics Oak Ukrit and his team.
Read on to see how to answer all of the 2019 questions.
| Question Number | Answer | Solution |
| 1. | A | \(\)\begin{align*} (3-2i)^2 & = 9 – 12i – 4\\ & = 5-12i \end{align*} Therefore, the answer is \(A\). |
| 2. | A | \begin{align*} \int \frac{\sin x}{\cos^3 x} dx &= -\int -\sin x \cos^{-3}x dx\\ & = -\frac{\cos^{-2} x}{-2} + C \text{ (using the reverse chain rule)}\\ & = \frac{1}{2}\sec^2x + C \end{align*} A possible primitive is \(A\). |
| 3. | C | We shall use integration by parts. \begin{align*} \int x\cos x dx &= x \sin x \ – \int 1\cdot \sin x dx\\ &= x \sin x +\cos x + C \end{align*} Hence, the answer is \(C\). |
| 4. | D | As \(2x^3 + bx^2 + cx + d\) is a cubic equation, it has at most three real roots. Since it has a double root, the roots must be \(1, 1, -3\) or \(1, -3, -3\). In either case, the sum of roots is equal to \(-\frac{b}{2}\). So then \(-\frac{b}{2}=-1\) or \(-5\). Hence, the possible values of \(b\) are \(2\) or \(10\). Thus, the answer must be \(D\) |
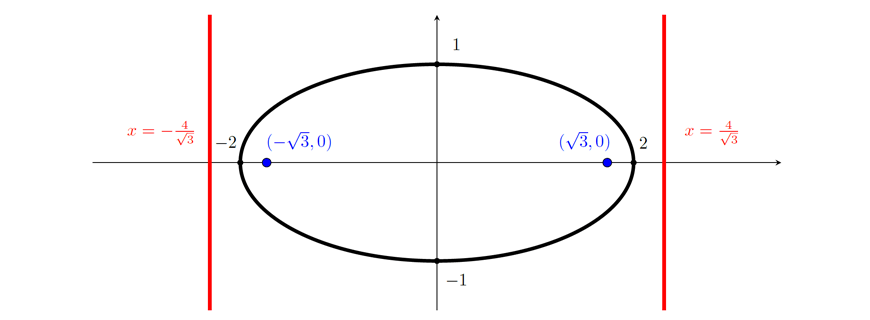
| 5. | B | The equation \(|z-2| + |z+1| = 7\) describes the locus of a point whose sum of distances from \(2\) and \(-1\) is constant. By the focal length property of an ellipse, the locus must be an ellipse with foci at \((-1,0)\) and \((2,0)\). Thus, the answer is \(B\). |
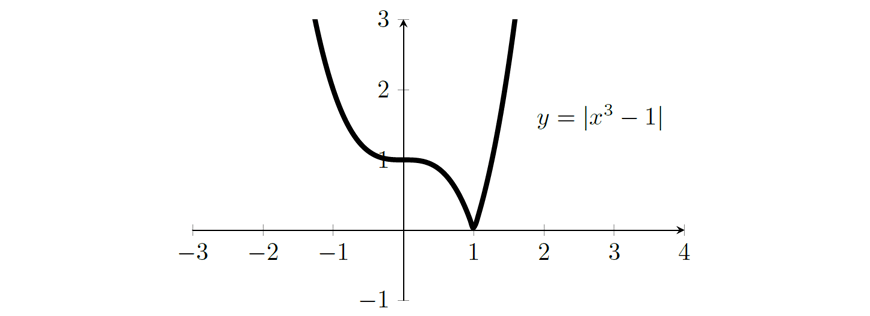
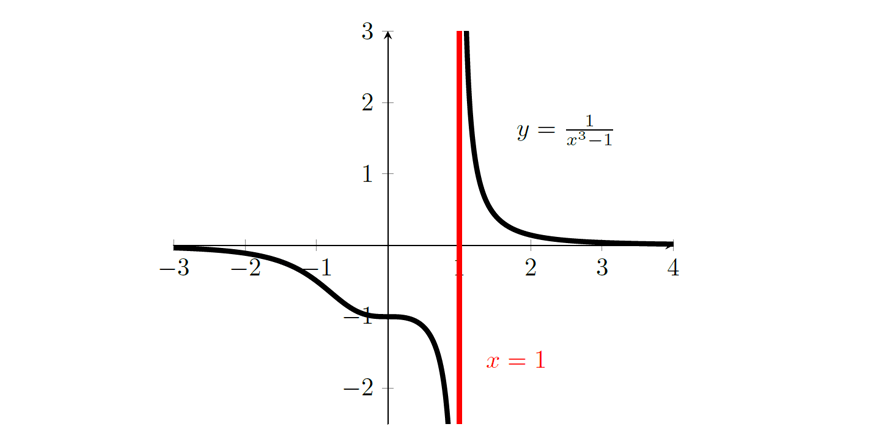
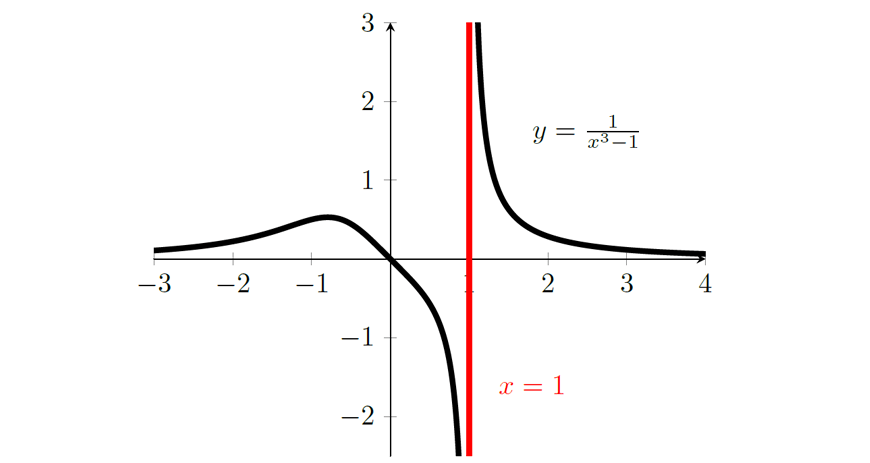
| 6. | C | Notice that we only need to determine the domain (the possible \(x\)-values) to determine which option is correct. Notice that the \(x\) term is written in absolute value signs, this means that the graph is even and so must be either \(B\) or \(D\). Further notice that since \(y^2\) is non-negative, we must ensure that \(2\sin|x|\) is also non-negative. This forces \(|x|\) to be in the first two quadrants and so if \(|x|\) lies in the third or fourth quadrant, the graph will not exist, Hence, the answer must be \(B\). |
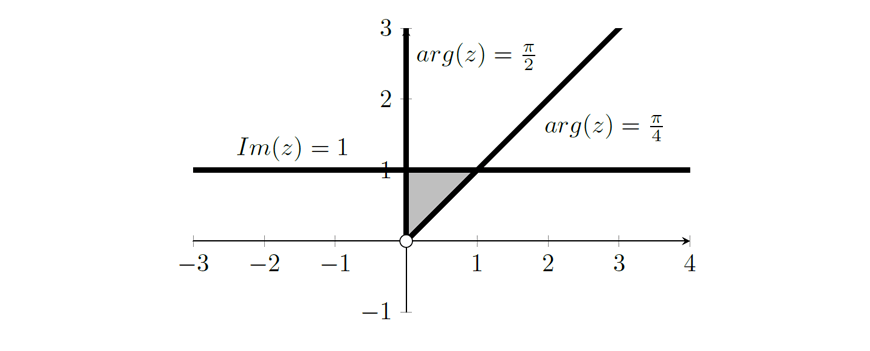
| 7. | D | Note that for \(0 < x < \frac{\pi}{4}\), \(0<\tan x<1.\) This means that \(0<\tan^2 x < \tan x<1.\) However, we also have that \(\tan x\) is concave up in this interval (that is, it lies under the straight line joining the origin and \((\frac{\pi}{4},1)\). Hence, \(0<\tan^2 x < \tan x < 1-\tan x < 1-\tan^2x<1.\) This means that \(D\) will have the largest value. |
| 8. | C | To determine which of the answers is correct, we only need to determine the argument of \(z\). Let \(\theta = arg(z)\). Hence, \(arg(z^2) = 2\theta\) and Hence, |
| 9. | D | As \(x\rightarrow -\infty, f'(x) \rightarrow C\) so \(f(x)\rightarrow Cx+D\) (a line). Hence \(f^{-1}(x)\) will also approach a line and thus \(g'(x)\) will approach a non-zero constant. Hence the answer is \(D\). |
| 10. | A | Since we are making codes with exactly two different digits, we consider two cases for the number each digit. Case 1: single and a triple. In this case, we can choose the single digit with \(10\) choices, and this digit can then be placed in one of \(4\) locations. We can then select the triple with a further \(9\) options, and then the location for these digits is fixed. Thus there are exactly \(10\cdot 4 \cdot 9 = 360\) codes of this form. Case 2: two doubles. Here we select the digits to be used in \(\binom{10}{2}=45\) ways. To arrange these \(4\) digits in a code, select the location for one of the pairs, then the location of the remaining pair is fixed. This can be done in \(\binom{4}{2}=6\) ways. Thus, for this case, there are a total of \(45 \cdot 6 = 270\) ways. Thus in total, there are \(360+270 = 630 \) such codes. |
Part (i)
\begin{align*}
z + \bar{w} &= (1+3i) + (2 + i)\\
& = 3 + 4i
\end{align*}
Part (ii)
\begin{align*}
\frac{z}{w} &= \frac{1+3i}{2-i}\\
&= \frac{1+3i}{2-i} \cdot \frac{2+i}{2+i}\\
&= \frac{2+i+6i-3}{4+1}\\
&= \frac{-1+7i}{5}\\
&= -\frac{1}{5}+\frac{7}{5}i
\end{align*}
\begin{align*}
\int \frac{1}{x^2 + 10x + 29} dx & = \int \frac{1}{x^2 + 10x + 25 + 4} dx\\
& = \int \frac{1}{(x+5)^2+ 4} dx\\
& = \frac{1}{2}\tan^{-1}\Big(\frac{x+5}{2}\Big)+C
\end{align*}
We shall first split the integrand into its partial fractions. That is, we wish to find constants \(A\) and \(B\) such that \(\frac{6}{x^2-9} = \frac{A}{x+3} + \frac{B}{x-3}.\) That is, \(6 \equiv A(x-3) + B(x+3).\)
Substituting \(x=3\) gives us that \(6B=6\) so \(B=1\). And similarly, substituting \(x=-3\) gives us that \(-6A=6\) so \(A=-1\).
Hence
\begin{align*}
\int \frac{6}{x^2-9} dx & = \int \frac{-1}{x+3} + \frac{1}{x-3} dx\\
& = -\ln|x+3| + \ln|x-3| +C\\
& = \ln\Big|\frac{x-3}{x+3}\Big| +C
\end{align*}
Part (i)
\(|z| = \sqrt{(-1)^2 + (\sqrt{3})^2} = \sqrt{1 + 3} = 2\) and \(\tan \theta = \frac{\sqrt{3}}{-1}\) so \(arg(z) = \frac{2\pi}{3}\). Thus, \(z=2cis(\frac{2\pi}{3})\).
Part (ii)
By De Moivre’s Theorem, \(z^3 = 2^3cis(\frac{2\pi}{3}\cdot 3) = 8cis(2\pi) = 8\).
Part (i)
Applying cosine rule on \(\triangle ABP\), we have that \(70^2 = x^2 + y^2-2\cdot x \cdot y \cdot \cos(\frac{2\pi}{3})\). Hence, \(70^2 = x^2 +xy+ y^2\)
Part (ii)
As Train \(B\) is moving at a constant speed of \(4\text{ms}^{-1}\), \(\frac{dy}{dt}=4\).
Implicit differentiation on the equation found in part (i) gives us that
\begin{align*}
2x + y + x \frac{dy}{dx} + 2y \frac{dy}{dx}&=0 \\
\frac{dy}{dx}(x+2y)&=-2x-y\\
\frac{dy}{dx}&=\frac{-2x-y}{x+2y}
\end{align*}
Thus, when \(x=30\) and \(y=50\), we have that \(\frac{dy}{dx}=\frac{-2\cdot 30 – 50}{30 + 2(50)} = \frac{-110}{130} = \frac{-11}{13}\).
Finally, we have that \(\frac{dx}{dt} = \frac{dx}{dy}\cdot \frac{dy}{dt} = \frac{13}{-11}\cdot 4 = \frac{-52}{11}\)
Using the method of cylindrical shells, we have that the radius of the shell would be \(x\) and that the height of the shell would be \(Ae^{-kx}\).
Hence, the area of the cylindrical shell at distance \(x\) is given by:
\begin{align*}
A & = 2\pi r h\\
&= 2 \pi x Ae^{-kx}
\end{align*}
Thus the required volume is given by
\begin{align*}
V &= \int_{10}^{40} 2 \pi x Ae^{-kx} dx\\
&= 2\pi A \int_{10}^{40} x e^{-kx} dx\\
&= 2\pi A \Big[ [x\cdot \frac{1}{-k} e^{-kx}]_{10}^{40} -\int_{10}^{40} \frac{1}{-k} e^{-kx} dx\Big] \text{ (using integration by parts)}\\
&= 2\pi A \Big[ \big(-\frac{40e^{-40k}}{k}+\frac{10e^{-10k}}{k}\big) +\frac{1}{k} \int_{10}^{40} e^{-kx} dx\Big] \\
&= \frac{2\pi A}{k} \Big[ 10e^{-10k}-40e^{-40k} +\frac{1}{-k}[e^{-kx}]_{10}^{40} \Big] \\
&= \frac{2\pi A}{k^2} \Big[ 10ke^{-10k}-40ke^{-40k} -e^{-40k}+e^{-10k} \Big]
\end{align*}
Part (i)
Part (ii)
Part (iii)
Part (i)
At \(P(a\sec\theta,b\tan\theta)\), we have that \(\frac{dx}{d\theta}=a\sec\theta\tan\theta\) and \(\frac{dy}{d\theta}=b\sec^2\theta\). Hence,
\begin{align*}
\frac{dy}{dx}&=\frac{dy}{d\theta}\cdot \frac{d\theta}{dx}\\
&=\frac{b\sec^2\theta}{a\sec\theta\tan\theta}\\
&=\frac{b\sec\theta}{a\tan\theta}
\end{align*}
Now using the point gradient formula, we have that the equation of the tangent is:
\begin{align*}
y-y_1 &= m(x-x_1)\\
y – b\tan\theta &= \frac{b\sec\theta}{a\tan\theta} (x-a\sec\theta)\\
ay\tan\theta – ab\tan^2\theta &= bx\sec\theta -ab\sec^2\theta\\
ab\sec^2\theta- ab\tan^2\theta &= bx\sec\theta-ay\tan\theta \\
ab(\sec^2\theta- \tan^2\theta) &= bx\sec\theta-ay\tan\theta \\
bx\sec\theta-ay\tan\theta &= ab
\end{align*}
Part (ii)
Tangent at \(P\):
\begin{equation}
bx\sec\theta-ay\tan\theta = ab \label{eq:1}
\end{equation}
Tangent at \(Q\):
\begin{equation}
bx\sec\phi-ay\tan\phi = ab \label{eq:2}
\end{equation}
Multiply both sides of \((1)\) by \(\tan\phi\):
\begin{equation}
bx\sec\theta\tan\phi-ay\tan\theta\tan\phi = ab\tan\phi \label{eq:3}
\end{equation}
Multiply both sides of \((2)\) by \(\tan\theta\):
\begin{equation}
bx\sec\phi\tan\theta-ay\tan\phi\tan\theta = ab\tan\theta \label{eq:4}
\end{equation}
The point is intersection is found by solving these equations simultaneously. Thus, by subtracting \((3)\) from \((4)\), we get that
\begin{align*}
bx_0\sec\phi\tan\theta- bx_0\sec\theta\tan\phi &= ab\tan\theta – ab\tan\phi \\
bx_0(\sec\phi\tan\theta- \sec\theta\tan\phi)&=ab(\tan\theta – \tan\phi)\\
x_0&=\frac{a(\tan\theta – \tan\phi)}{\sec\phi\tan\theta – \sec\theta\tan\phi}
\end{align*}
Part (iii)
To prove that \(O\), \(M\) and \(T\) are collinear, we will show that \(m_{OM} = m_{OT}\).
First, we find the coordinates of \(M\).
\begin{align*}
M\Big(\frac{a\sec\theta + a\sec\phi}{2},\frac{b\tan\theta + b\tan\phi}{2}\Big)
\end{align*}
Now we find the gradient \(OM\).
\begin{align*}
m_{OM} & = \frac{\frac{b\tan\theta + b\tan\phi}{2}-0}{\frac{a\sec\theta + a\sec\phi}{2}-0}\\
& = \frac{b\tan\theta + b\tan\phi}{a\sec\theta + a\sec\phi}\\
& = \frac{b(\tan\theta + \tan\phi)}{a(\sec\theta + \sec\phi)}
\end{align*}
Similarly, we can find the gradient of \(OT\):
\begin{align*}
m_{OT} & = \frac{\frac{b(\sec\theta – \sec\phi)}{\sec\phi\tan\theta – \sec\theta\tan\phi}-0}{\frac{a(\tan\theta – \tan\phi)}{\sec\phi\tan\theta – \sec\theta\tan\phi}-0}\\
& = \frac{b(\sec\theta – \sec\phi)}{a(\tan\theta – \tan\phi)}
\end{align*}
Now to show that \(m_{OM}=m_{OT}\), observe that
\begin{align*}
\sec^2\theta – \tan^2\theta &= \sec^2\phi – \tan^2\phi\\
\sec^2\theta – \sec^2\phi &= \tan^2\theta – \tan^2\phi\\
(\sec\theta + \sec\phi)(\sec\theta – \sec\phi) &= (\tan\theta + \tan\phi)(\tan\theta – \tan\phi)\\
\frac{\sec\theta – \sec\phi}{\tan\theta – \tan\phi} &= \frac{\tan\theta + \tan\phi}{\sec\theta + \sec\phi}
\end{align*}
This shows that \(M_{OM} = M_{OT}\)
Part (i)
As we are finding the area of a trapezium, we need to find the length of the top, bottom and height.
The height is given by the function \(y=1-x^2\). The using the right-angled isoceles triangle, we see that the length of the base of the trapezium is constant and \(1\) unit long.
Notice that \(\angle CDA=45^\circ\). Let \(E\) be the projection of \(C\) onto \(AD\).
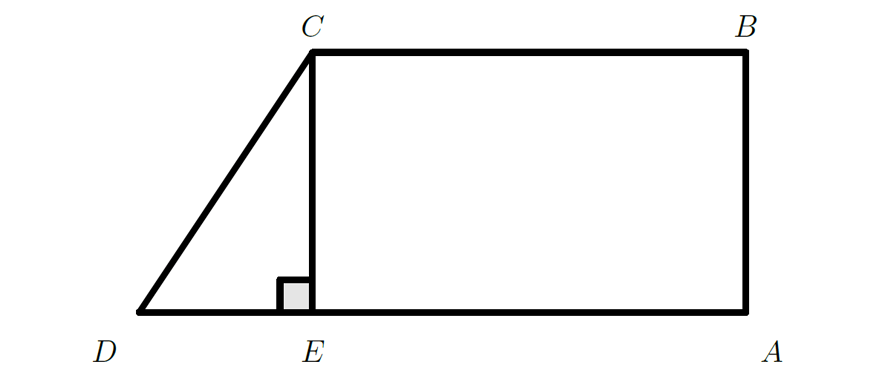
Then we have that \(CE=BA=1-x^2\) and so \(DE=CE=1-x^2\). This means that \(BC = AD – DE = 1 – (1-x^2) = x^2\).
Hence, \(Area_{ABCD} = \frac{1+x^2}{2}\cdot (1-x^2) = \frac{1-x^4}{2}\)
Part (ii)
To calculate the volume of the solid, we integrate the area found in (i) from \(-1\) to \(1\).
\begin{align*}
V &= \int_{-1}^1 \frac{1-x^4}{2} dx\\
&= 2\int_0^1 \frac{1}{2} – \frac{x^4}{2} dx\\
&= 2\Big[\frac{x}{2} – \frac{x^5}{10}\Big]_0^1\\
&= 2\Big[\frac{1}{2} – \frac{1}{10}-0+0\Big]\\
&= \frac{4}{5} u^3
\end{align*}
Part (i)
The equations for motion of Object 1 are
\begin{align*}
x &= 20\cos\Big(\frac{\pi}{3}\Big)t\\
x &= 10t\\
\\
y &= -4.9t^2 + 20\sin\Big(\frac{\pi}{3}\Big)t\\
y &= -4.9t^2 + 10\sqrt{3}t
\end{align*}
Hence, Object 1 hits the ground at \(y=0\), that is, \(-4.9t^2 + 10\sqrt{3}t=0\) or \(t(-4.9t + 10\sqrt{3})=0\). This means that \(t = 0\) or \(t = \frac{10\sqrt{3}}{4.9}\). But \(t=0\) is the start of motion, so Object 1 hits the ground at \(t = \frac{10\sqrt{3}}{4.9}\).
This means that the range is \(x = 10 \cdot \frac{10\sqrt{3}}{4.9} = \frac{100\sqrt{3}}{4.9}\).
Part (ii)
We are now trying to find the values of \(v\) and \(\theta\) that will satisfy the equations of motion for Object 2. Since it is projected two seconds after Object 1, its equations will be, \(x = v\cos\theta(t-2)\) and \(y = -4.9(t-2)^2 + v\sin\theta(t-2)\) at the point where \(x=\frac{100\sqrt{3}}{4.9}\), \(y=0\) and \(t=\frac{10\sqrt{3}}{4.9}\). Hence, we have that:
\begin{align}
\frac{100\sqrt{3}}{4.9} &= v\cos\theta\Big(\frac{10\sqrt{3}}{4.9}-2\Big)\nonumber\\
v\cos\theta &= 23.031\ldots \label{eq:5}\\
\nonumber\\
0 &= -4.9\Big(\frac{10\sqrt{3}}{4.9}-2\Big)^2 + v\sin\theta\Big(\frac{10\sqrt{3}}{4.9}-2\Big)\nonumber\\
v\sin\theta &= 7.52050\ldots \label{eq:6}
\end{align}
To solve these simultaneously, divide \(v \sin \theta \) by \(v \cos \theta\)
\begin{align*}
\tan\theta &= 0.3265381\\
\theta &= 18.1^\circ (1 d.p.)
\end{align*}
Substitute this back to find \(v\):
\begin{align*}
v\cos18.1^\circ &= 23.031\\
v &= 24.2m/s~(1 d.p.)
\end{align*}
Let the normal force be \(N\). Since there are no other forces, resolving the forces gives us:
\(\text{Vertically: } N\cos\theta = mg\)
\(\text{Horizontally: } N\sin\theta = \frac{mv^2}{r}\)
Dividing these equations, we obtain:
\begin{align*}
\frac{N\sin\theta}{N\cos\theta} &= \frac{\frac{mv^2}{r}}{mg}\\
\tan\theta &= \frac{v^2}{rg}\\
v^2 &= gr\tan\theta
\end{align*}
Part (i)
The terminal velocity is found by solving \(\ddot{x}=0\). That is,
\begin{align*}
0 &= g-kw\\
w = \frac{g}{k}
\end{align*}
Part (ii)
We require the parachutist to slow down from \(1.6w\) to \(1.1w\).
\begin{align*}
\ddot{x} &= g-kv\\
\frac{dv}{dt} &= g-kv\\
\frac{dt}{dv} &= \frac{1}{g-kv}\\
t &= \int_{1.6w}^{1.1w} \frac{1}{g-kv} dv\\
t &= -\frac{1}{k}[ln|g-kv|]_{1.6w}^{1.1w}\\
t &= -\frac{1}{k}\Big[ln|g-1.1kw|-ln|g-1.6kw|\Big]\\
t &= -\frac{1}{k}ln\Big|\frac{g-1.1kw}{g-1.6kw}\Big|\\
t &= -\frac{1}{k}ln\Big|\frac{g-1.1k\frac{g}{k}}{g-1.6k\frac{g}{k}}\Big|\\
t &= -\frac{1}{k}ln\Big|\frac{g-1.1g}{g-1.6g}\Big|\\
t &= -\frac{1}{k}ln\Big|\frac{-0.1g}{-0.6g}\Big|\\
t &= -\frac{1}{k}ln\Big|\frac{1}{6}\Big|\\
t &= \frac{1}{k}ln|6|
\end{align*}
Part (iii)
\begin{align*}
\ddot{x} &= g-kv\\
v\frac{dv}{dx} &= g-kv\\
\frac{dv}{dx} &= \frac{g-kv}{v}\\
\frac{dx}{dv} &= \frac{v}{g-kv}\\
D &= \int_{1.6w}^{1.1w} \frac{v}{g-kv} dv\\
D &= -\frac{1}{k}\int_{1.6w}^{1.1w} \frac{-kv}{g-kv} dv\\
D &= -\frac{1}{k}\int_{1.6w}^{1.1w} 1 -\frac{g}{g-kv} dv\\
D &= -\frac{1}{k}\Big[v + \frac{g}{k}ln|g-kv| \Big]_{1.6w}^{1.1w}\\
D &= \frac{g}{k^2}\Big[\frac{vk}{g} + ln|g-kv| \Big]_{1.1w}^{1.6w}\\
D &= \frac{g}{k^2}\Big[\frac{1.6wk}{g} + ln|g-1.6wk| – \frac{1.1wk}{g} – ln|g-1.1wk| \Big]\\
D &= \frac{g}{k^2}\Big[0.5\frac{vk}{g} + ln\Big|g-1.6k\frac{g}{k}\Big| – ln\Big|g-1.1k\frac{g}{k}\Big| \Big]\\
D &= \frac{g}{k^2}\Big[0.5 + ln\Big|g-1.6g\Big| – ln\Big|g-1.1g\Big| \Big]\\
D &= \frac{g}{k^2}\Big[\frac{1}{2} + ln\Big|-0.6g\Big| – ln\Big|-0.1g\Big| \Big]\\
D &= \frac{g}{k^2}\Big[\frac{1}{2} + ln\Big|\frac{-0.6g}{-0.1g}\Big|\Big]\\
D &= \frac{g}{k^2}\Big[\frac{1}{2} + ln|6|\Big]
\end{align*}
Part (i)
\begin{align*}
LHS & = \cot x – \cot 2x\\
& = \frac{\cos x}{\sin x} – \frac{\cos 2x}{\sin 2x}\\
& = \frac{\cos x}{\sin x} – \frac{2\cos^2x-1}{2\sin x\cos x}\\
& = \frac{2\cos^2 x}{2\sin x\cos x} – \frac{2\cos^2x-1}{2\sin x\cos x}\\
& = \frac{1}{2\sin x\cos x}\\
& = \frac{1}{\sin 2x}\\
& = \csc 2x
\end{align*}
Part (ii)
Base case: Prove true for \(n=1\).
\(LHS = \csc 2x\), \(RHS = \cot x – \cot 2x\). By part (ii), we see that the statement is true for \(n=1\).
Inductive step: Assume true for \(n=k\) where \(k\) is some integer greater than or equal to 1. That is, assume that \(\sum_{r=1}^k \csc (2^r x) = \cot x – \cot(2^kx). \)
Required to prove true for \(n=k+1\). That is, we are required to prove that \(\sum_{r=1}^{k+1} \csc (2^r x) = \cot x – \cot(2^{k+1}x). \)
Proof:
\begin{align*}
LHS &= \sum_{r=1}^{k+1} \csc (2^r x)\\
&= \sum_{r=1}^{k} [\csc (2^r x)] + \csc (2^{k+1} x)\\
&= \cot x – \cot(2^kx) + \csc (2^{k+1} x)\\
&= \cot x – \cot (2^{k+1} x) \text{ by substituting } x \text{ for } 2^kx \text{ in part (i)}\\
&= RHS
\end{align*}
Part (i)
\begin{align*}
RHS &= \int_{-a}^a\frac{f(-x)}{f(x) + f(-x)} dx\\
&= \int_{a}^{-a}\frac{f(u)}{f(-u) + f(u)} \cdot -du \text{ substituting } u = -x\\
&= \int_{-a}^{a}\frac{f(u)}{f(-u) + f(u)} \cdot du\\
&= \int_{-a}^{a}\frac{f(x)}{f(-x) + f(x)} \cdot dx \text{ replacing } u \text{ with } x\\
&= LHS
\end{align*}
Part (ii)
Let \(I = \int_{-1}^1\frac{e^{x}}{e^x + e^{-x}} dx.\) Then by part (i) we also have that \(I = \int_{-1}^1\frac{e^{-x}}{e^x + e^{-x}} dx.\) Adding the two equations above, we have that
\begin{align*}
2I &= \int_{-1}^1\frac{e^{x}}{e^x + e^{-x}} +\int_{-1}^1\frac{e^{-x}}{e^x + e^{-x}} dx \\
2I &= \int_{-1}^1\frac{e^{x} + e^{-x}}{e^x + e^{-x}} dx\\
2I &= \int_{-1}^1 1 dx \\
2I &= 2 \\
I &= 1
\end{align*}
Part (i)
In the case where \(w=y\), the chance for either play to win on their turn is the same. Since, player \(A\) goes first, they will have a higher chance of winning.
Part (ii)
Note that as the game progresses, the number of balls in the urn never changes until there is a winner. Thus, the probability that \(A\) will win on any turn is \(\frac{w}{w+y}\) and the probability that \(B\) will win on any turn is \(\frac{y}{w+y}.\)
The cases where \(B\) will win the game are:
Summing these together, we find that the probability that \(B\) will win is
\begin{align*}
P(B~wins) &= \big(\frac{y}{w+y}\big)^2 + \big(\frac{w}{w+y}\big)\big(\frac{y}{w+y}\big)^3 + \big(\frac{w}{w+y}\big)^2\big(\frac{y}{w+y}\big)^4 + \cdots \\
P(B~wins) &= \frac{\big(\frac{y}{w+y}\big)^2}{1-\big(\frac{w}{w+y}\big)\big(\frac{y}{w+y}\big)}\\
P(B~wins) &= \frac{y^2}{(w+y)^2 – wy}\\
P(B~wins) &= \frac{y^2}{w^2 + 2wy + y^2 – wy}\\
P(B~wins) &= \frac{y^2}{w^2 + wy + y^2}
\end{align*}
In order for \(B\) to have a greater chance of winning, we need \(P(B~win) > \frac{1}{2}\). That is,
\begin{align*}
\frac{y^2}{w^2 + wy + y^2} > \frac{1}{2}\\
2y^2 > w^2 + wy + y^2\\
y^2 – wy – w^2 > 0\\
\Big(\frac{y}{w}\Big)^2 – \frac{y}{w} – 1 > 0
\end{align*}
Thus, \(\frac{y}{w} > \frac{1 + \sqrt{1+4}}{2} \text{ or } \frac{y}{w} < \frac{1 – \sqrt{1+4}}{2}\)
\(\frac{y}{w} > \frac{1 + \sqrt{5}}{2} \text{ or } \frac{y}{w} < \frac{1 – \sqrt{5}}{2}.\)
But \(w\) and \(y\) are positive, so we must have that \(\frac{y}{w} > \frac{1 + \sqrt{5}}{2}\)
Part (i)
\begin{align*}
\int_0^1 \frac{x}{(x+1)^2} dx &= \int_0^1 \frac{x+1 -1}{(x+1)^2} dx\\
&= \int_0^1 \frac{x+1}{(x+1)^2} – \frac{1}{(x+1)^2} dx\\
&= \int_0^1 \frac{1}{x+1} – \frac{1}{(x+1)^2} dx\\
&= \Big[\ln|x+1| + \frac{1}{x+1}\Big]_{0}^1\\
&= \Big[\ln|2| + \frac{1}{2}\Big] – \Big[\ln|1| + \frac{1}{1}\Big]\\
& = \ln2 – \frac{1}{2}
\end{align*}
Part (ii)
\begin{align*}
I_n &= \int_0^1\frac{x^n}{(x+1)^2}dx\\
&=\int_0^1\frac{x^{n-1}((x+1)-1)}{(x+1)^2}dx\\
&=\int_0^1\frac{x^{n-1}}{x+1}dx – I_{n-1}
\end{align*}
| \(u = (x+1)^{-1}\) | \(v’ = x^{n-1}\) |
| \(u’ = -\frac{1}{(x+1)^2}\) | \(v = \frac{x^n}{n}\) |
\begin{align*}
∴ I_n &= \left[\frac{x^n}{x(1+x)}\right]_0^1 + \frac{1}{n}\int_0^1\frac{x^n}{(1+x)^2}dx – I_{n-1}\\
&= \frac{1}{2n} + \frac{1}{n}I_n – I_{n-1}\\
∴ I_n&(1-\frac{1}{n}) = \frac{1}{2n}-I_{n-1}\\
I_n&(\frac{n-1}{n}) = \frac{1}{2n} – I_{n-1}\\
I_n &= \frac{1}{2(n-1)} – \frac{n}{n-1}I_{n-1} \,\, \textrm{ as required}
\end{align*}
Part (iii)
\begin{align*}
I_3 &= \frac{1}{2(2)} – \frac{3}{2}I_2\\
&= \frac{1}{4} – \frac{3}{2}(\frac{1}{2}-2I_1)\\
&= \frac{1}{4} – \frac{3}{4} + 3(\ln 2 – \frac{1}{2})\\
&= -\frac{1}{2} + 3\ln 2 – \frac{3}{2}\\
&= 3\ln 2 – 2
\end{align*}
Part (i)
\begin{align*}
x^3+px+q=0, \,\,p,q\in\mathbb{R}\,\,p>0\\
\textrm{Letting }r=\sqrt{\frac{4p}{3}} \textrm{ and } \cos 3\theta = -\frac{4q}{r^3}:\\
\textrm{Now }-\frac{4q}{r^3} = 4\cos^3\theta – 3\cos\theta\\
∴ r^3\cos^3\theta – \frac{3r^2}{4}(r\cos\theta)+q = 0\\
\textrm{Since } r=\sqrt{\frac{4p}{3}},\,\,p = \frac{3r^2}{4}\\
\end{align*}
Therefore the above is a polynomial in \(r\cos\theta\) in the form \(x^3+px+q = 0\) and hence \(r\cos\theta\) is a root.
Part (ii)
\begin{align*}
x^3+9x^2+15x-17&=0\\
\textrm{Let }u=\alpha+3, \textrm{ so }\alpha = u&-3\\
\textrm{Then } (u-3)^3 + 9(u-3)^2 + 15(u-3) – 17 &= 0\\
u^3-9u^2+27u-27 + 9u^2 – 54u + 81 + 15u – 45 – 17 &= 0\\
u^3 – 12u – 8 &= 0\\
\textrm{Hence } \alpha+3,\beta+3,\gamma+3 \textrm{ are roots of } x^3-12x-8&=0
\end{align*}
Part (iii)
Solve \(x^3-12x-8=0\) for \(\alpha+3,\beta+3,\gamma+3\) by recognising that it is of the form in part (i) where \(p=12\) and \(q=-8\).
ie. \(r=\sqrt{\frac{4\times12}{3}} = 4\) and \(\cos3\theta = -\frac{4(-8)}{4^3}=\frac{1}{2}\)
The roots will be of the form \(4\cos\theta\) where \(\cos3\theta = \frac{1}{2}\)
\(\Rightarrow3\theta = \frac{\pi}{3},\frac{5\pi}{3},\frac{7\pi}{3}\Rightarrow \theta = \frac{\pi}{9},\frac{5\pi}{9},\frac{7\pi}{9}\)
\(∴ \alpha+3 = 4\cos\frac{\pi}{9}, \beta+3 = \frac{5\pi}{9}, \gamma+3 = \frac{7\pi}{9}\)
and thus the solutions of \(x^3+9x^2+15x-17=0\) are \(4\cos\frac{\pi}{9} – 3, 4\cos\frac{5\pi}{9}-3, 4\cos\frac{7\pi}{9}-3\)
Part (i)
\begin{align*}
\textrm{Let } P(z) = z^4 – 2kz^3 + 2k^2z^2 + mz + 1\\
\textrm{where } k,m\in\mathbb{R}.\textrm{ Roots are } \alpha,\bar{\alpha},\beta,\bar{\beta}.\,\,|\alpha|=|\beta|=1\\
\end{align*}
We use the fact that:
\begin{align*}
(Re(\alpha))^2 + (Re(\beta))^2 &= (Re(\alpha) + Re(\beta))^2 – 2Re(\alpha)Re(\beta)\\
\textrm{where } Re(\alpha)+ Re(\beta) &= \frac{\alpha+\bar{\alpha}+\beta+\bar{\beta}}{2} = \frac{2k}{2} = k\\
\textrm{and } 2Re(\alpha)Re(\beta) &= 2\left(\frac{\alpha+\bar{\alpha}}{2}\right)\left(\frac{\beta+\bar{\beta}}{2}\right)\\
&=\frac{1}{2}(\alpha\beta + \alpha\bar{\beta} + \bar{\alpha}\beta + \bar{\alpha}\bar{\beta})\\
&=\frac{1}{2}[(\alpha\beta + \alpha\bar{\beta} + \bar{\alpha}\beta + \bar{\alpha}\bar{\beta} + \alpha\bar{\alpha} + \beta\bar{\beta}) – (\alpha\bar{\alpha} + \beta\bar{\beta})]\\
&=\frac{1}{2}(2k^2-2)\\
&=k^2-1\\
\textrm{Thus } (Re(\alpha))^2 + (Re(\beta))^2 &= k^2-(k^2-1) = 1 \textrm{ as required}\\
\end{align*}
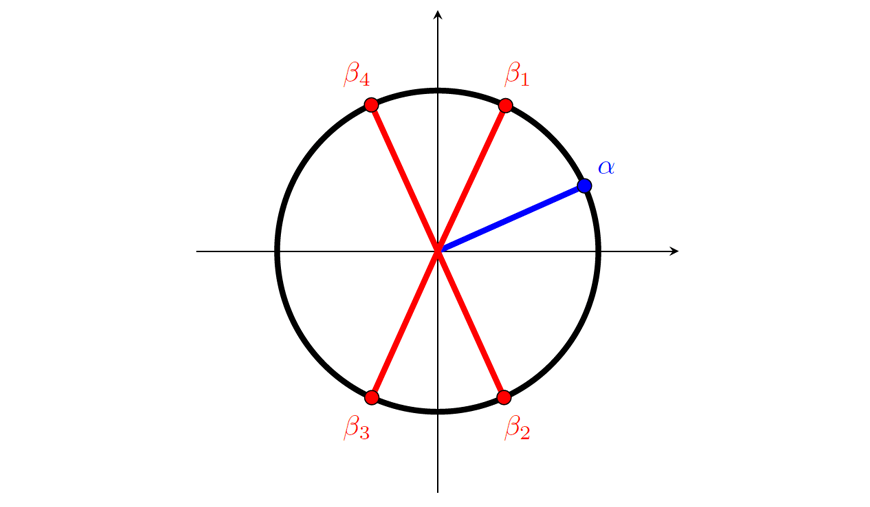
Part (ii)
From part (i) we have that \(Re(\alpha)^2 + Re(\beta)^2 = 1\). But since \(|a|=1\) we have that \(Re(\alpha)^2 + Im(\alpha)^2 = 1\). Hence, we must have \(Re(\beta)^2 = Im(\alpha)^2\) so that \(Re(\beta)^2 = \pm Im(\alpha)\). Since \(|\beta|=1\) we have that \(\beta\) also lies on the unit circle. Hence, plotting the possible positions of \(\beta\), we have that
\begin{align*}
\angle ACD &= \angle ABD \textrm{ (angles standing on common arcs)}\\
\angle BAC &= \angle BDC \textrm{ (angles standing on common arcs)}\\
\angle ACD &= \pi – \angle AED \textrm{ (opposite angles on cyclic quad)}\\
∴ \angle ABD &= \pi – E\\
∴ B &= \angle ABD + \angle CBD = \angle CBD + \pi – E\\
∴ \angle CBD &= B + E – \pi\\
C &= \angle DCA + \angle ACB\\
&= \pi – E + \angle ACB \textrm{ (opposite angles on cyclic quad)}\\
∴ \angle ACB &= C + E – \pi\\
\textrm{Consider } \Delta ABC &\textrm{ and } \Delta BCD\\
\frac{a}{\sin\angle CBD}&=\frac{e}{\sin\angle BDC}\\
∴ e &= \frac{a\sin\angle BDC}{\sin\angle CBD}\\
\frac{d}{\sin\angle ACB}&=\frac{e}{\sin\angle BAC}\\
∴ e &= \frac{d\sin\angle BAC}{\sin\angle ACB}\\
∴ \frac{a\sin\angle BDC}{\sin\angle CBD} &= \frac{d\sin\angle BAC}{\sin\angle ACB}\\
\textrm{Since } \angle BAC &= \angle BDC\\
\sin\angle BAC &= \sin\angle BDC\\
∴ \frac{a}{\sin\angle CBD} &= \frac{d}{\sin\angle ACB}\\
\frac{a}{\sin(B+E-\pi)} &= \frac{d}{\sin(C+E-\pi)}\\
\frac{a}{-\sin(\pi-(B+E))} &= \frac{d}{-\sin(\pi-(C+E))}\\
\frac{a}{\sin(B+E)} &= \frac{d}{\sin(C+E)} \textrm{ as required}
\end{align*}
Use the calculator to explore the HSC Marks you need to achieve your ATAR Goal.
Written by Matrix Maths Team
The Matrix Maths Team are tutors and teachers with a passion for Mathematics and a dedication to seeing Matrix Students achieving their academic goals.© Matrix Education and www.matrix.edu.au, 2025. Unauthorised use and/or duplication of this material without express and written permission from this site’s author and/or owner is strictly prohibited. Excerpts and links may be used, provided that full and clear credit is given to Matrix Education and www.matrix.edu.au with appropriate and specific direction to the original content.