Welcome to Matrix Education
To ensure we are showing you the most relevant content, please select your location below.
Select a year to see courses
Select a year to see available courses
Congratulations Year 12 on getting through some of the toughest challenges in your schooling! The Matrix Maths team has put together the 2022 HSC Maths Extension 2 Solutions, so you don't have to wait to see how you went!
Join 75,893 students who already have a head start.
"*" indicates required fields

Join 8000+ students each term who already have a head start on their school academic journey.
In this article, we reveal 2022 HSC Maths Ext 2 Exam Paper Solutions, complete with full explanations written by the Matrix Maths Team.
Have you seen the 2022 HSC Mathematics Extension 2 Exam Paper yet? For reference, you can find it, here.
Doing past papers? Find all the solutions to the 2018 – 2022 HSC Maths Ext 2 Exams, here.
| Question | Answer | Solution |
| 1 | A | Since \(1<\mathrm{Re}(z)\), the vertical line indicating \(\mathrm{Re}(z)=1\) should be dashed. Similarly, as \(\mathrm{Arg}(z) < \frac{\pi}{3}\), the line through the origin with angle \(\frac{\pi}{3}\) to the horizontal is dashed. |
| 2 | D | Line 4 does not follow from Line 3. If \(x,y\) are real numbers such that \(x^2=y^2\), then we either have \(x=y\) OR \(x=-y\). |
| 3 | B | The `B’ statement in the implication structure \((A \Rightarrow B)\) is “there exists a real number \(\lambda\) such that \(\overrightarrow{AP}=\lambda \overrightarrow{AB}\)”. To negate this, we need to say “there does not exist a real number \(\lambda\)…” such that the equation is true. Hence, for all real numbers \(\lambda\), we have \(\overrightarrow{AP}\ne\lambda \overrightarrow{AB}\), which corresponds to the choice B. |
| 4 | C | Let’s go through each choice.
We conclude that C is the only valid choice. |
| 5 | C | Recall that a primitive for a function \(f\) is another function \(F\) such that \(F’=f\). This rules out both A and B, since if we differentiate these choices, we only obtain expressions with \(f\) and \(f’\). By the fundamental theorem of calculus, we have \begin{equation*} g'(x) = \frac{d}{dx}\int_a^x f(t)\,dt = f(x). \end{equation*} Therefore, by the chain rule, \begin{equation*} \frac{d}{dx}\left(\frac{1}{2}[g(x)]^2\right) = g(x)g'(x)=f(x)g(x), \end{equation*} which shows that C is correct. For completeness, we check D as well: \begin{equation*} \frac{d}{dx}\left(\frac{1}{2}[g'(x)]^2\right) = g'(x)g”(x)=f(x)f'(x) \end{equation*} which is incorrect. |
| 6 | A | If \(z\) is a non-real complex number, it must have a non-zero imaginary part. With this in mind, we discuss each of the choices.
|
| 7 | B | The statement itself is false. For example, take \(n=3\) which is a prime number. However, \(\frac{3\times 4}{2}=6\) is not prime. The converse statement is: for all integers \(n\ge 1\), if \(\displaystyle\frac{n(n+1)}{2}\) is a prime number, then \(n\) is a prime number. We claim that this is false. To prove this, it would be sufficient to show that for some integer \(n\ge 1\), if \(\frac{n(n+1)}{2}\) is prime, then \(n\) is not prime. However, we can even show a stronger statement: for any integer \(n\ge 3\), if \(\frac{n(n+1)}{2}\) is prime, then \(n\) is not prime. Indeed, suppose \(n\ge 3\), and assume \(p=\displaystyle\frac{n(n+1)}{2}\) is a prime number. Assume for contradiction that \(n\) is prime. Since \(n\ge 3\) and prime, \(n\) is odd. Thus \(n+1\) is even, which implies that \(\frac{n+1}{2}\) is an integer and is greater than 1. However, we obtain the factorisation
|
| 8 | B | The frictional force opposes the direction of the velocity vector. Since the constant \(k\) was assumed to be positive, we are looking for a minus sign in front of the velocity vector. This rules out A and C. Finally, the magnitude of the force is proportional to the square of the speed \(v\) of the projectile. Be careful here! Recall that \(v=\|(\dot{x},\dot{y})\|\). If we take the magnitude of the resistive force in D, we get \begin{equation*} \bigg\|-kv^2\begin{pmatrix} \dot{x}\\ \dot{y}\end{pmatrix}\bigg\| = kv^2\bigg\|\begin{pmatrix} \dot{x}\\ \dot{y}\end{pmatrix}\bigg\| = kv^3, \end{equation*} which is incorrect! Hence we see that B gives the correct proportionality \(kv^2\) upon taking the magnitude of the resistive force. |
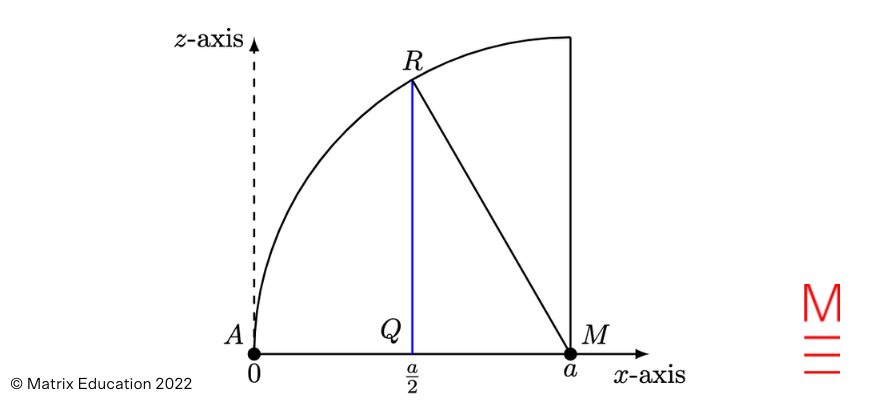
| 9 | D | Unless you have excellent intuition for 3D geometry, this is quite tricky! We will make use of some algebra to help. Firstly, by translating and rotating the line segment \(AB\) (clearly this procedure does not change its length), we may assume that \(A\) is the origin \((0,0,0)\) and that \(B\) has coordinates \((2a,0,0)\) for some \(a>0\). Therefore \(M\) has coordinates \((a,0,0)\). Letting \(P=(x,y,z)\) be the variable point, the condition \(\overrightarrow{AP}\cdot\overrightarrow{BP}=0\) translates to \begin{equation*} which shows that \(S_1\), the locus of \(P\), is a sphere centred at \((a,0,0)\) with radius \(a\). Observe that the centre coincides with the point \(M\). The condition \(|\overrightarrow{AN}|=|\overrightarrow{MN}|\) is reminiscent of a perpendicular bisector. However, we are in 3D, which leads us to conclude that \(S_2\) is the plane passing through \((\frac{a}{2},0,0)\) that is parallel to the \(yz\)-plane and bisects the line segment \(AM\). This plane intersects the sphere \(S_1\) in a circle with centre \((\frac{a}{2},0,0)\). To find the radius, consider looking at a slice in the \(xz\)-plane:
The diagram shows part of the cross-section of the sphere \(S_1\) on the \(xz\)-plane, where \(MR\) is a radius of the sphere, and the blue line \(QR\) is part of the plane \(S_2\). The length of \(QR\) is the radius of the circle of intersection, which is centred at \(Q\). Since \(|MR|=|AM|=a\), by Pythagoras’ theorem we obtain \begin{equation*} Hence D is the correct response. |
| 10 | C | In options A and B, the downwards motion can be modelled by the differential equation
In scenarios C and D, the upwards motion can be modelled by the differential equation
|
(a)
| Multiplying the numerator and denominator by \(\overline{2 + i} = 2 – i\) gives \begin{align*} |
(b)
| Let \(u = \sin 2x\). Then \(du = 2 \cos 2x \, dx\) and \begin{align*} |
(c)
(i)
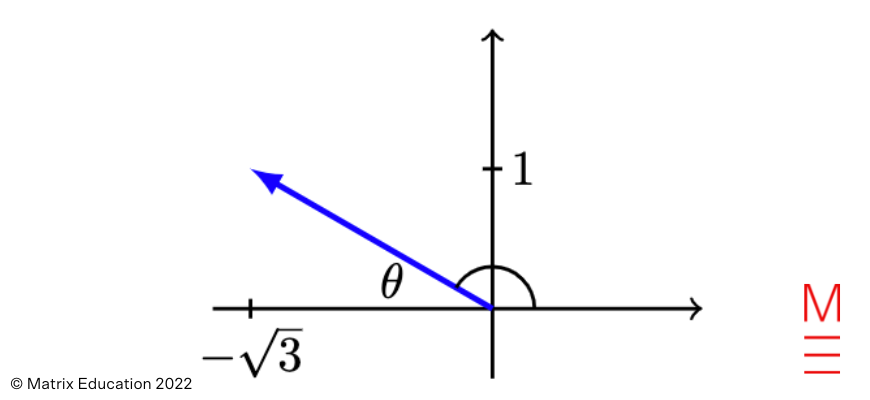
| Let \(z=-\sqrt{3}+i\). The modulus is \(|z|=\sqrt{3+1}=\sqrt{4}=2\). The vector associated with \(z\) is in the 2nd quadrant:
We have \(\theta=\displaystyle\frac{\pi}{6}\), and hence the (principal) argument of \(z\) is \(\displaystyle\frac{5\pi}{6}\). Therefore the exponential form of \(z\) is \begin{equation*} |
(ii)
| Using properties of the complex exponential function, we obtain \begin{equation*} Now \(e^{i\frac{\pi}{3}}=\cos(\frac{\pi}{3})+i\sin(\frac{\pi}{3})=\frac{1+i\sqrt{3}}{2}\), so we conclude \begin{equation*} |
(d)
| We have \begin{equation*} \overrightarrow{BA}=(1,-1,2)-(0,2,-1)=(1,-3,3) \end{equation*} and \begin{equation*} \overrightarrow{BC}=(2,1,1)-(0,2,-1)=(2,-1,2). \end{equation*} 
The lengths of these vectors are \begin{equation*} The angle \(\theta=\angle ABC\) is expressed by the cosine formula: \begin{equation*} Therefore \begin{equation*} to the nearest degree. |
(e)
| Since \(\ell_1\) is parallel to \(\begin{pmatrix}3 \\ 2\end{pmatrix}\) and \(\ell_2\) is parallel to \(\ell_1\), that means that we can use \(\begin{pmatrix}3 \\ 2\end{pmatrix}\) as a direction vector for \(\ell_2\). Since we are also given that \(\ell_2\) passes through \((-6,5)\), we can obtain a vector equation for \(\ell_2\) as follows: \begin{equation*} \begin{pmatrix} x \\ y \end{pmatrix} = \begin{pmatrix} -6 \\ 5 \end{pmatrix} + \mu \begin{pmatrix} 3 \\ 2 \end{pmatrix} \,, \end{equation*}where \(\mu \in \mathbb{R}\). Thus, \begin{equation} x = -6 + 3 \mu \tag{1} \end{equation}and\begin{equation} y = 5 + 2 \mu. \tag{2} \end{equation}Now, \((1) \times 2-(2) \times 3\) gives\begin{align*} 2x-3y &=-12 + 6 \mu-15-6 \mu \\ \\ 2x-3y &= -27 \\ \\ -3y &= -2x-27 \end{align*}so\begin{equation*} \ell_2: \quad y = \frac{2}{3} x + 9. \end{equation*} |
(f)
| Let \(t = \tan \tfrac{x}{2}\). Then \begin{equation*} \sin x = \frac{2t}{1 + t^2} \,, \quad \cos x = \frac{1-t^2}{1 + t^2} \,, \quad dx = \frac{2}{1 + t^2} \, dt \,, \end{equation*} so \begin{align*} \int \frac{dx}{1 + \cos x – \sin x} &= \int \frac{1}{1 + \cos x-\sin x} \, dx \\ \\ &= \int \left(\frac{1}{1 + \frac{1 – t^2}{1 + t^2} – \frac{2t}{1 + t^2}}\right) \left(\frac{2}{1 + t^2}\right) \, dt \\ \\ &= \int \frac{2}{1 + t^2 + 1-t^2-2t} \, dt \\ \\ &= \int \frac{2}{2-2t} \, dt \\ \\ &= \int \frac{1}{1-t} \, dt \\ \\ &=-\ln \left|1-t\right| + C \\ \\ &=-\ln \left|1-\tan \frac{x}{2}\right| + C. \end{align*} |
(a)
| Consider \((\sqrt{a}-\sqrt{b})^2\), which is non-negative: \begin{align*} (\sqrt{a} – \sqrt{b})^2 &\geq 0 \\ \\ a – 2 \sqrt{a} \sqrt{b} + b &\geq 0 \\ \\ a + b &\geq 2 \sqrt{ab} \\ \\ \frac{a + b}{2} &\geq \sqrt{ab} \end{align*} as required. |
(b)
| Integrating \(a\) gives the velocity: \begin{align*} We are given that the particle starts from rest, i.e. when \(t = 0\), \(v = 0\): \begin{align*} so the velocity is \begin{equation*} Integrating \(v\) gives the displacement: \begin{align*} We are given that the particle starts at the origin, i.e. when \(t = 0\), \(x = 0\): \begin{align*} so the displacement is \begin{equation*} Since \(v\) attains its maximum when \(\tfrac{dv}{dt} = 0\), i.e. \(a = 0\), that means \begin{align*} To confirm that the velocity is indeed the maximum, we can use the second derivative test: \begin{align*} Thus \(v\) attains its maximum at \(t = 2\), and at that time the position is \begin{equation*} |
(c)
(i)
| By Newton’s Second Law of motion, with \(m = 1\) and writing \(a = v \frac{dv}{dx}\), we obtain \begin{align*} F &= ma \\ \\ -\left(v + 3v^2\right) &= \left(1\right) v \frac{dv}{dx} \\ \\ \frac{dv}{dx} &= -\left(1 + 3v\right) \end{align*} as required. |
(ii)
| Separation of variables gives \begin{align*} When \(t = 0\), \(x = 0\) and \(v = u\): \begin{align*} So \begin{align*} Since the particle is initially moving with speed \(u\) to the right and it is never at rest (i.e. it can never change directions), \(u > 0\) and \(v > 0\) at all time \(t\), which means that the absolute value can be removed: \begin{equation*} |
(d)
| Let \begin{equation*} \frac{4 + x}{\left(1 – x\right) \left(4 + x^2\right)} = \frac{A}{1 – x} + \frac{Bx + C}{4 + x^2}. \end{equation*}Multiply both sides by \(\left(1 – x\right) \left(4 + x^2\right)\) to get\begin{align*} 4 + x &= A \left(4 + x^2\right) + \left(Bx + C\right) \left(1 – x\right) \\ \\ x + 4 &= 4A + Ax^2 + Bx – Bx^2 + C – Cx \\ \\ x + 4 &= \left(A – B\right)x^2 + \left(B – C\right) x + \left(4A + C\right). \end{align*}Comparing coefficients gives \begin{alignat}{4} \phantom{1} A & {}-{} & B & {}\phantom{+}{} & & {}={} & 0 \tag{1} \\ & & B & {}-{} & C & {}={} & 1 \tag{2} \\ 4A & & & {}+{} & C & {}={} & 4. \tag{3} \end{alignat}Now, \(\text{Eq.}(1) + \text{Eq.}(2)\) gives\begin{alignat}{4} \phantom{1} A & {}\phantom{-}{} & \phantom{B} & {}\phantom{-}{} & {}-{} & C & {}={} & 1 \tag{4} \end{alignat}and \(\text{Eq.}(3) + \text{Eq.}(4)\) gives\begin{align*} 5A &= 5 \\ A &= 1. \end{align*}Substitute \(A = 1\) into Eq.(1):\begin{align*} 1 – B &= 0 \\ B &= 1. \end{align*}Substitute \(B = 1\) into Eq.(2): \begin{align*} Thus, \begin{equation*} and we complete the calculation: \begin{align*} |
(e)
| Note to students: this question has appeared in the Matrix Term 1 Theory book in 2021. 🙂 If \(z=e^{i\theta}\) where \(\theta\in\mathbb{R}\), then \begin{align*} which is clearly purely imaginary. In the last step of working above, we have used the standard identities \begin{equation*} |
(a)
| We will prove the contrapositive: for all integers \(n\ge 3\), if \(n\) is even, then \(2^n-1\) is not prime. If \(n\) is even, then we can express this as \(n = 2k\) for some \(k \in \mathbb{N}\). Then, we can factorise the expression \(2^n – 1\) as follows \begin{align*} 2^n – 1 &= 2^{2k} – 1 \\ &= (2^k)^2 – 1 \\ &= (2^k – 1)(2^k + 1) \end{align*} Since \(n \geq 3\), then \(k \geq 2\) and so neither \(2^k -1\) or \(2^k+1\) is \(1\). Hence, \(2^n – 1\) is not prime as we have found two non-trivial integer factors. |
(b)
| We check the base case \(n=1\). Then \begin{equation*} 2 \cos\left(\frac{\pi}{2^2}\right) = 2\cos\left(\frac{\pi}{4}\right)=\frac{2}{\sqrt{2}}=\sqrt{2} \end{equation*} which agrees with the definition of \(a_1\). Hence the base case is true.Now assume that \(a_n = 2\cos(\frac{\pi}{2^{n+1}})\) for some \(n\ge 1\). We will prove that the formula holds for \(n+1\). Using the given recurrence relation and the induction hypothesis, we find \begin{equation*} a^2_{n+1} = 2+a_n = 2+2\cos\left(\frac{\pi}{2^{n+1}}\right) = 2+2\left[2\cos^2\left(\frac{\pi}{2^{n+2}}\right)-1\right] = 4\cos^2\left(\frac{\pi}{2^{n+2}}\right). \end{equation*} Since the sequence consists of positive numbers, we can take positive square roots and conclude \begin{equation*} a_{n+1} = 2\cos\left(\frac{\pi}{2^{n+2}}\right). \end{equation*} Therefore the formula holds for \(n+1\), and this completes the induction. |
(c)
(i)
| We write \(-1=e^{i(\pi+2k\pi)}\) for \(k\in\mathbb{Z}\). If \(z^5=-1\), then \begin{equation*} z = e^{i\left(\frac{2k+1}{5}\right)},\qquad k=0,1,2,3,4. \end{equation*} Substituting each value of \(k\), we obtain the solutions \begin{equation*} z = e^{i\frac{\pi}{5}}, e^{i\frac{3\pi}{5}}, -1, e^{i\frac{7\pi}{5}}, e^{i\frac{9\pi}{5}} \end{equation*} which can be rewritten as \begin{equation*} z = e^{i\frac{\pi}{5}}, e^{i\frac{3\pi}{5}}, -1, e^{-i\frac{3\pi}{5}}, e^{-i\frac{\pi}{5}}. \end{equation*} For the purposes of part (iii), we note that the conjugate pairs are \(z=e^{\pm i\frac{\pi}{5}}\) and \(z=e^{\pm i\frac{3\pi}{5}}\). |
(ii)
| If \(z^5+1=0\), then we can factorise \begin{equation*} 0 = (z+1)(z^4-z^3+z^2-z+1). \end{equation*} However, given that \(z\ne 1\), it follows that \begin{equation*} z^4-z^3+z^2-z+1=0. \end{equation*} Clearly, \(z=0\) is not a solution to this equation, so we can divide by \(z^2\) to obtain \begin{equation*} z^2 + \frac{1}{z^2} -\left(z+\frac{1}{z}\right)+1 = 0. \end{equation*} By completing the square above and using \(u=z+\frac{1}{z}\), we deduce \begin{equation*} \left(z+\frac{1}{z}\right)^2 -\left(z+\frac{1}{z}\right)-1 = u^2-u-1=0 \end{equation*} as required. |
(iii)
| Firstly we obtain the solutions to \(u^2-u-1=0\) by the quadratic formula: \begin{equation*} u = \frac{1\pm \sqrt{5}}{2}. \end{equation*} Now \(u=z+\frac{1}{z}\), where \(z\) is a non-real solution to \(z^5+1=0\). Since \(|z|=1\), we have \(\frac{1}{z}=\bar{z}\), and therefore \begin{equation*} u = z+\bar{z} = 2\mathrm{Re}(z). \end{equation*} Looking back at the solutions to (i), we recall that the conjugate pairs of roots were \(z=e^{\pm i\frac{\pi}{5}}\) and \(z=e^{\pm i\frac{3\pi}{5}}\). Therefore \begin{equation*} u = 2\cos\left(\frac{\pi}{5}\right), 2\cos\left(\frac{3\pi}{5}\right). \end{equation*} Since cosine is a decreasing function on \([0,\pi]\), it follows that the smaller value of \(u\) corresponds to the larger angle. Hence \begin{equation*} \frac{1-\sqrt{5}}{2} = 2\cos\left(\frac{3\pi}{5}\right) \Longrightarrow \cos\left(\frac{3\pi}{5}\right) = \frac{1-\sqrt{5}}{4}. \end{equation*} (As a sanity check, observe that \(\frac{3\pi}{5}>\frac{\pi}{2}\) is an angle in the 2nd quadrant, so \(\cos(\frac{3\pi}{5})\) should indeed be a negative value). |
(a)
(i)
| We prove the statement by contrapositive. Suppose that \(\lambda,\mu\) are not both \(0\). Without loss of generality, we assume \(\lambda\ne 0\). In the equation \(\lambda\vec{u}+\mu\vec{v}=\vec{0}\), we may divide by \(\lambda\) and rearrange to obtain \begin{equation*} \vec{u} = -\frac{\mu}{\lambda}\vec{v}. \end{equation*} This shows that \(\vec{u}\) is parallel to \(\vec{v}\). |
(ii)
| The given equation can be rearranged to become \begin{equation*} (\lambda_1-\lambda_2)\vec{u} + (\mu_1-\mu_2)\vec{v}=\vec{0}. \end{equation*} Since the vectors \(\vec{u},\vec{v}\) are not parallel, by part (i) we deduce that \(\lambda_1-\lambda_2=\mu_1-\mu_2=0\), i.e. \(\lambda_1=\lambda_2\) and \(\mu_1=\mu_2\).Note to students: given any two vectors \(\vec{u},\vec{v}\), an expression of the form \(\lambda\vec{u}+\mu\vec{v}\) (where \(\lambda,\mu\) are scalars) is called a linear combination of \(\vec{u}\) and \(\vec{v}\). |
(iii)
| The strategy is to obtain two different expressions for the vector \(\overrightarrow{BL}\) in such a way that makes (ii) applicable. This means we need to express \(\overrightarrow{BL}\) as a linear combination of two non-parallel vectors. As \(\overrightarrow{SK}\) is given as a linear combination of \(\overrightarrow{SC}\) and \(\overrightarrow{SB}\), it seems reasonable to choose these vectors. Firstly, observe that there exists a scalar \(\lambda\in (0,1)\) such that We can combine equations \(\overrightarrow{BL} = \lambda(\overrightarrow{SC}-\overrightarrow{SB})\) and \( \overrightarrow{BL} = \frac{\mu}{3}\overrightarrow{SC}+\left(\frac{\mu}{4}-1\right)\overrightarrow{SB}\) to find \begin{equation*} Since \(\overrightarrow{SC}\) and \(\overrightarrow{SB}\) are not parallel, we can apply the result of part (ii) and obtain two equations: \begin{equation*} Adding the two equations yields \(\frac{\mu}{3}+\frac{\mu}{4}-1=0\), so \(\mu=\frac{12}{7}\), and then \(\lambda=\frac{4}{7}\). However, we started with \(\overrightarrow{BL}=\lambda \overrightarrow{BC}\), and therefore |
(iv)
| Yes. Firstly, using the result of (iii), we have \begin{align*} and therefore \(7\overrightarrow{AL}=3\overrightarrow{AB}+4\overrightarrow{AC}\). \begin{equation*} We have shown that \(\overrightarrow{AP}\) is parallel to \(\overrightarrow{AL}\). But since these vectors share a common point, this means that \(P\) lies on the line \(AL\). |
(b)
| Note to students: a question very similar to this appeared in the Matrix Term 4 Theory books in 2020 and 2021. |
(i)
| An easy calculation: \begin{equation*} J_0 = \int_0^1 e^{-x}\,dx = \bigg[-e^{-x}\bigg]^1_0 = e^0 – e^{-1} = 1-\frac{1}{e}. \end{equation*} |
(ii)
| Observe that \(e^{-x}\le 1\) for all \(x\in [0,1]\). Consequently \begin{equation*} J_n = \int_0^1 x^n e^{-x}\,dx \le \int_0^1 x^n \,dx = \frac{1}{n+1}. \end{equation*} |
(iii)
| This is a straightforward integration by parts: \begin{align*} |
(iv)
| The base case is \(n=0\). In that case, the given formula yields \begin{equation*} which agrees with the definition of \(J_0\) in part (i). Thus the base case is true.Assume now that the formula holds for some \(n\ge 0\). We show that it holds for \(n+1\). Using the recurrence relation in (iii), we obtain \begin{equation*} We then apply the induction hypothesis to find \begin{align*} Thus the formula holds for \(n+1\), which completes the induction. |
(v)
| From part (ii), we have the inequality \begin{equation*} 0 \le J_n \le \frac{1}{n+1} \Longrightarrow 0\le \frac{J_n}{n!} \le \frac{1}{(n+1)!}. \end{equation*} Using the formula for \(J_n\) proved in (iv), we obtain \begin{equation*} 0\le \frac{J_n}{n!}= 1-\frac{1}{e}\sum_{r=0}^n \frac{1}{r!}\le\frac{1}{(n+1)!}. \end{equation*} Since \(\frac{1}{(n+1)!}\to 0\) as \(n\to\infty\), we conclude \begin{equation*} 0 \le 1-\frac{1}{e}\lim_{n\to\infty}\sum_{r=0}^n\frac{1}{r!}\le\lim_{n\to\infty}\frac{1}{(n+1)!}=0, \end{equation*} which implies \begin{equation*} 1-\frac{1}{e}\lim_{n\to\infty}\sum_{r=0}^n\frac{1}{r!} = 0 \Longrightarrow e = \lim_{n\to\infty}\sum_{r=0}^n\frac{1}{r!}. \end{equation*} Bonus remarks: the sequence \(\frac{1}{(n+1)!}\) converges extremely fast to 0 as \(n\to\infty\). This shows that the sum \begin{equation*} \sum_{r=0}^n \frac{1}{r!} \end{equation*} is a very good approximation to \(e\) when \(n\) is chosen sufficiently large. More generally, the exponential function can be represented by an infinite sum as follows: \begin{equation*} e^z = \sum_{r=0}^\infty \frac{z^r}{r!} \quad\text{for all } z\in\mathbb{C}. \end{equation*} |
(a)
| This question appears more complicated than it actually is. 🙂 |
(i)
| We are given that the horizontal components of forces are balanced at all times. Therefore \begin{equation*} T_1 \cos\theta = T_2 \cos\phi. \end{equation*} The vertical component of tension from \(T_1\) balances the combined weight force of the machine and the vertical component of tension from \(T_2\). Therefore \begin{equation*} T_1 \sin\theta = Mg + T_2\sin\theta. \end{equation*} If we take the ratio of the second equation with the first, we find that \begin{equation*} \frac{T_1\sin\theta}{T_1\cos\theta} = \frac{Mg+T_2\sin\phi}{T_2\cos\phi} \Longrightarrow \tan\theta = \tan\phi + \frac{Mg}{T_2\cos\theta} \end{equation*} as required. |
(ii)
| We take a closer look at the equation established in part (i). Using basic trigonometry, we observe that \(\tan\theta = \frac{\ell}{d}\), and \(\tan\phi = \frac{h-\ell}{2d}\). The term \(\frac{Mg}{T_2\cos\phi}\) is a positive number which turns out to be irrelevant. Thus \begin{equation*} \frac{\ell}{d} = \frac{h-\ell}{2d} + \frac{Mg}{T_2\cos\phi} > \frac{h-\ell}{2d}. \end{equation*} The height of the machine above ground is \(h-\ell\). We rearrange the above inequality to deduce \begin{equation*} 2\ell > h-\ell \Longrightarrow \ell > \frac{h}{3} \Longrightarrow h-\ell<h-\frac{h}{3}=\frac{2h}{3}. \end{equation*} Hence the machine is always less than \(\frac{2h}{3}\) metres above ground. |
(b)
| The force will be given by Newton’s second law: \(F=ma\). The mass of the piston is given, so our task is to find the maximum acceleration. For a particle in simple harmonic motion, recall that the maximum acceleration is given by \(a_{\max}=n^2 A\), where \(n\) is the angular frequency in radians (\(=\) cycles) per second, and \(A\) is the amplitude. From the given information, we obtain |
(c)
| This is a slightly tricky integral. Firstly, we calculate the differential: \begin{equation*} x=\tan^2\theta \Longrightarrow dx = 2\tan\theta\sec^2\theta \,d\theta. \end{equation*} Now we compute \begin{align*} I=\int_0^1 \sin^{-1}\sqrt{\frac{x}{x+1}}\,dx &= \int_0^{\pi/4} \sin^{-1}\sqrt{\frac{\tan^2\theta}{1+\tan^2\theta}}\cdot 2\tan\theta\sec^2\theta\,d\theta \\ &= \int_0^{\pi/4} 2 \sin^{-1}\left(\frac{\tan\theta}{\sec\theta}\right)\tan\theta\sec^2\theta\,d\theta \\ &= \int_0^{\pi/4} 2\sin^{-1}(\sin\theta)\tan\theta\sec^2\theta\,d\theta. \end{align*} Since the sine function is one-to-one on the domain \([0,\frac{\pi}{4}]\), we have \(\sin^{-1}(\sin\theta)=\theta\) (warning: this is not true in general!). Therefore the integral reduces to \begin{equation*} I = \int_0^{\pi/4} 2\theta\tan\theta\sec^2\theta\,d\theta. \end{equation*} We complete the computation using integration by parts: \begin{align*} I = \int_0^{\pi/4} \theta \frac{d}{d\theta}(\tan^2\theta)\,d\theta &= \bigg[\theta\tan^2\theta\bigg]^{\pi/4}_0 – \int_0^{\pi/4}\tan^2\theta\,d\theta \\ &= \frac{\pi}{4}-\int_0^{\pi/4}(\sec^2\theta-1)\,d\theta \\ &= \frac{\pi}{4}+\frac{\pi}{4}-\bigg[\tan\theta\bigg]^{\pi/4}_0 \\ &= \frac{\pi}{2}-1. \end{align*} |
(d)
| Firstly we transform the equation \begin{equation*} \left|z-\frac{4}{z}\right|=2 \iff |z^2-4|=2|z|. \end{equation*} Now we use the triangle inequality in a clever way: if \(z,w\) are any two complex numbers, then \begin{equation*} |z|=|(z-w)+w|\le |z-w|+|w|, \end{equation*} and therefore \(|z|-|w| \le |z-w|\). We use this inequality with \(z^2\) replacing \(z\) and \(w=4\). Hence \begin{equation*} |z|^2-4 = |z^2|-4 \le |z^2-4| = 2|z|. \end{equation*} This is now a quadratic inequality for \(|z|\), which we can solve easily by completing the square. Indeed, \begin{align*} |z|^2-4\le 2|z| &\iff |z|^2-2|z|-4\le 0 \\ & \iff (|z|-1)^2 – 5\le 0 \iff (|z|-1)^2\le 5. \end{align*} Finally, we take square roots in the final inequality and rearrange to obtain \(0\le |z|\le \sqrt{5}+1\). |
(a)
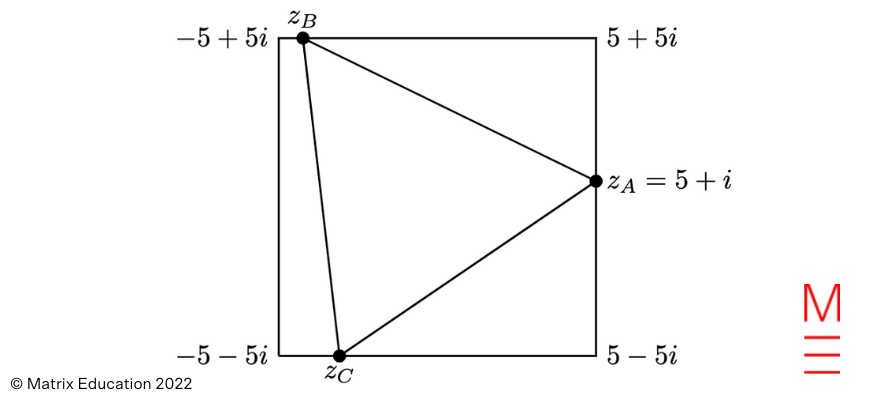
| Observe that \(z_B = b+5i\) and \(z_C = c-5i\) for some real numbers \(b,c\) to be determined.
We obtain the vectors \begin{align*} Since the numbers \(z_A,z_B,z_C\) form an equilateral triangle, it follows that the vector \(\overrightarrow{z_C z_B}\) is obtained by rotating the vector \(\overrightarrow{z_C z_A}\) anticlockwise by \(\frac{\pi}{3}\). In terms of complex number arithmetic, this means multiplication by \(e^{i\pi/3}=\frac{1+i\sqrt{3}}{2}\). Therefore \begin{align*} We equate imaginary parts on both sides of the above equation: \begin{align*} On the other hand, by equating real parts we obtain \begin{equation*} We can now substitute the value of \(c\) found earlier to obtain the exact value of \(b\): \begin{equation*} Therefore \begin{equation*} (As a sanity check, \(\frac{15-16\sqrt{3}}{3}\approx -4.2376\), which is certainly compatible with the diagram) |
(b)
| Let \(H\) be the maximum height attained and \(T\) be the amount of time it takes to reach it. Upward motion: When \(t = 0\), \(v = v_0\): \begin{align*} so \begin{align*} When \(v = 0\), \(t = T\), we obtain \begin{equation} Now, rewrite the left hand side of Eq.(1) using \(a = \tfrac{dv}{dt} = v \tfrac{dv}{dx}\): \begin{align*} When \(x = 0\), \(v = v_0\): so \begin{align*} When \(x = H\), \(v = 0\): \begin{align} Downward motion: \begin{align} When \(t = 0\), \(v = 0\): so \begin{align*} Using the initial condition (when \(t = 0\), \(v = 0\)), we conclude that the expression for \(v\) must be \begin{equation*} Since \(v = \frac{dx}{dt}\), \begin{align*} When \(t = 0\), \(x = 0\): \begin{align*} so \begin{equation*} When \(t = 7-T\), \(x = H\): \begin{align} Consider Eq.(2): Finally, we substitute Eq.(5) into Eq.(4) to find the value of \(v_0\): \begin{align*} |
(c)
(i)
| If a rectangular prism has dimensions \(a,b,c\), then its surface area \(S\) is given by \begin{equation*} Now we use the given arithmetic-geometric mean inequality for \(x_1=ab, x_2=ac\) and \(x_3=bc\). In this case, we have and therefore \begin{equation*} Taking the square root on both sides yields the desired result \begin{equation*} |
(ii)
| The volume of the rectangular prism is \(V = abc\), then using part (i) gives \[V \leq \left(\frac{S}{6}\right)^\frac{3}{2}.\] That is, \(V\) has an upper bound of \(\left(\frac{S}{6}\right)^\frac{3}{2}\). If our rectangular prism is a cube, then \(a = b = c\). So, \(V = a^3\) and \(S = 6a^2\). Confirming that \(\left(\frac{S}{6}\right)^\frac{3}{2} = \left(a^2\right)^\frac{3}{2} = a^3 = V\), this means that the rectangular prism attains maximum volume when it is a cube. |
(d)
| Let \(r\) denote the common value of the modulus of \(z_1, z_2, z_3\). By taking the modulus on both sides of the third equation, we have that \begin{equation*} and hence \(r=1\). Next, we compute \begin{equation*} If \(w\) is any complex number of modulus 1, then \(\frac{1}{w}=\bar{w}\) (we used this fact in Q13(c) already). Applying this observation to the above equation, we find \begin{align*} Therefore the numbers \(z_1,z_2,z_3\) are precisely the solutions to the cubic equation \begin{equation*} This can be solved easily. We factorise \begin{equation*} and hence the solutions are \(1,i\) and \(-i\). Remark: it is (perhaps?) interesting to note that the same polynomial appeared in Question 4. |
Written by Matrix Maths Team
The Matrix Maths Team are tutors and teachers with a passion for Mathematics and a dedication to seeing Matrix Students achieving their academic goals.© Matrix Education and www.matrix.edu.au, 2025. Unauthorised use and/or duplication of this material without express and written permission from this site’s author and/or owner is strictly prohibited. Excerpts and links may be used, provided that full and clear credit is given to Matrix Education and www.matrix.edu.au with appropriate and specific direction to the original content.